AVR單片機集成CAN總線控制器分析與應用

引言
CAN總線應用中,總線節點是CAN總線的基本組成部分。CAN總線節點有兩種典型設計方法,第一種方法采用MCU結合獨立CAN控制器組成總線節點[1];第二種方法采用獨立的MCU,這時MCU需要內部集成CAN控制器。由于第二種設計方法所用的器件少,電路關系簡單,已得到廣泛應用。本文重點分析AVR系列單片機內部集成的CAN控制器及其應用方法。
AT90CAN集成CAN總線控制器分析
AVR內部集成CAN控制器的芯片主要包括AT90CAN32/64/128三種單片機,它們之間的主要區別是存儲空間不同。
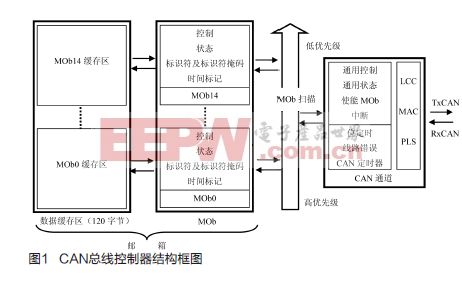
AT90CAN32/64/128內部集成的CAN總線控制器由CAN通道和郵箱組成,其工作參數通過寄存器設置,工作過程也通過寄存器監控。CAN控制器基本結構如圖1所示。
CAN總線控制器組成
CAN通道
CAN通道是CAN控制器用于完成發送和接收的部分。使用CAN控制器時,需要對CAN通道工作模式和位定時進行設置。
(1)CAN通道工作模式
CAN通道有使能、待命以及只聽三種工作模式。不同模式下通道、時鐘以及寄存器的工作模式不同,詳細內容見參考文獻[3]。
(2)位定時
CAN通道位定時的概念和基本規定與CAN總線協議一致。AVR系列單片機中,CAN總線控制器時間份額(TQ)即為波特率分頻器輸出時鐘信號的周期。CAN總線位周期由同步段(SYNS)、傳播段(PRS)、相位緩沖段1(PHS1)、相位緩沖段2(PHS2)組成,每個時間段的長度都是時間份額(TQ)的整數倍。通過位定時設置可以確定各時間段的長度,同時還可以設置重同步跳轉寬度(SJW)以及信號采樣位置和采樣次數。設置時,CAN總線位時間必須設置在8~25個時間份額之間。位定時設置完畢后即可計算總線波特率,計算方法見參考文獻[3]。
郵箱及報文對象(MOb)
AT90CAN32/64/128單片機集成的CAN控制器通過郵箱存儲報文,并以MOb的形式管理。郵箱包含15個獨立的MOb,每個MOb都可以設置為接收或發送模式。發送時,編號小的MOb優先級高。接收時,只有當CAN控制器接收到報文的標識符與某個MOb預先設置的標識符吻合時,CAN控制器才會將接收到的報文存儲在該MOb中,并可以通過中斷的方式通知單片機。CAN控制器還可自動對遠程幀作出應答,從而減輕CPU的負擔。
(1)MOb工作模式

MOb包括禁止、發送、接收、自動應答、幀緩沖器接收等6種不同的工作模式。芯片復位后,MOb并沒有默認的工作狀態。因此,在使能MOb之前必須對MOb進行配置,配置內容及相應的工作模式如表1所示。










評論