基于ARM LPC2292 的CAN總線和以太網間的

0 引言
本文引用地址:http://www.czjhyjcfj.com/article/104875.htmCAN 總線是一種設備互連的總線型控制網絡,與其它的現場總線相比,CAN 總線的數據通信具有突出的可靠性、實時性和靈活性。這些特點使得其能同時滿足過程控制和制造業自動化的需求,因此被認為是最具有發展前途的現場總線之一。但是,由于其收發器驅動能力的限制,約束了CAN 總線的最遠直接傳輸距離和總線上可以掛接的最大節點數,給系統組網帶來了一定的困難。而另一方面,由于以太網的低成本、開放性、應用軟硬件的支持以及強大的組網能力,目前已經是應用最廣泛的局域網絡技術,越來越多的工程師們開始采用CAN 總線與以太網結合的技術。針對這樣一種情況,本文提出一種CAN 總線和以太網互連系統的設計方案,實現CAN 總線網和以太網的數據互連。
1 系統結構
用網關連接CAN 現場總線和以太網的網絡架構圖如圖1 所示。
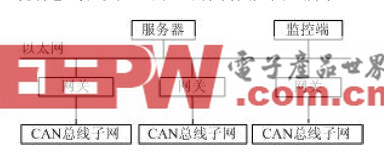
圖1 系統網絡結構示意圖
網關的嵌入不僅使管理深入到控制現場,同時給系統組網帶來了很大的方便。
1.1 網關嵌入的益處
① 增大了系統的最大CAN節點數
在不接中繼器的條件下,一個CAN 子網內最多可以掛接110 個節點,而每個網關下可以連接一個子網,通過多個網關可以把多個子網聯系在一起,從而增加了系統的節點數。
② 擴大了系統的組網范圍
CAN 的直接通信距離大概只有10km 左右,系統按照現場區域和節點數構建子網,子網與子網通過以太網連接,從而突破了區域和距離的限制。
③ 實現了具有不同傳輸速度的現場總線子網的相互通信網關提供一個友好的人機接口,用戶可以根據需要設置IP 地址和CAN 控制器的波特率。
1.2 網關嵌入的問題
網關的應用給系統帶來方便的同時,也付出了一定的代價,在設計中必須考慮這些問題,以提高系統的整體效率。這些問題表現在:
①實時性
由于使用網關,對數據的處理必須經歷先存儲,再轉換,最后再發送的過程,增加了一些存儲轉發延時。因此在設計中必須考慮系統的實時性,要求系統能在存儲新接收到的數據后立即啟動協議轉換和數據轉發任務,盡量減小系統延時。
② 安全性
若網關出現故障,會對CAN 子網和以太網間的通信產生影響,甚至會癱瘓這個子網與整個系統的通信。因此在硬件設計中,要盡量避免干擾等問題的出現;軟件設計必須能對一些可糾正錯誤及時作出反應,并把錯誤信息返回給用戶。
2 網關硬件設計
網關硬件設計分為CAN 接口、以太網網絡接口和人機接口等3 個部分。
2.1 主控制器的選擇
主控制器采用Philips 的ARM 控制器LPC2292。LPC2292 基于一個支持實時仿真和跟蹤TM 的16/32 位ARM7TDMI-SCPU。CPU 內核工作電壓為1.8V,引腳工作電壓為3.3V。
LPC2292 帶有256 k 字節(kB)嵌入的高速Flash 存儲器,完全可以滿足系統代碼的容量要求,無需外擴存儲器;獨特的加速結構使32 位代碼能夠在最大時鐘速率下運行,可實現TCP/IP 協議棧中的ARP、TCP、UDP、ICMP 等網絡協議。
LPC2292 內部集成兩個CAN 控制器,方便系統采用冗余設計。CAN控制器主要特性有:單個總線上的數據傳輸速率高達1Mb/s;32 位寄存器和RAM 訪問;兼容CAN2.0B,ISO11898-1規范;全局驗收濾波器可以識別所有的11 位和29 位Rx 標識符;驗收濾波器為選擇的標準標識符提供了FullCAN-style 自動接收。
CPU 外部靜態存儲器控制器為CPU 內部系統總線和外部存儲器或外部I/O 器件提供了一個接口。利用這種外部總線可以方便與以太網網卡控制器進行連接。
2.2 CAN 接口
考慮系統的安全性,CAN 接口部分采用冗余設計。當正常通道發生故障時自動調用冗余通道進行傳輸;如果冗余通道也發生故障,則進入故障處理。其硬件接口示意圖如圖2 所示。LPC2292 兩路通道分別通過高速總線驅動器TJA1050 與總線相連。總線驅動器采用帶隔離的DC/DC 單獨供電,不僅實現了兩路通道之間的電氣隔離,也實現了網關與總線之間的電氣隔離。
2.3 網絡接口
網卡控制器采用臺灣RETACK 公司的10M 以太網控制芯片RTL8019 ,支持全雙工工作模式,軟件兼容8 位或16 位的NE2000 模式;內部集成DMA 控制器、ISA 總線控制器以及16kRAM 、網絡PHY 收發器等。RTL8019 使用LPC2292 外部存儲控制的BANK3 部分,它的數據地址范圍為0x83400000~0x8340001F 。RTL8019 的工作電壓為+5V,而LPC2292 的引腳工作電壓為3.3V ,所以還應在連接線上串聯470 Ω 的保護電阻。網絡采用雙絞線傳輸。
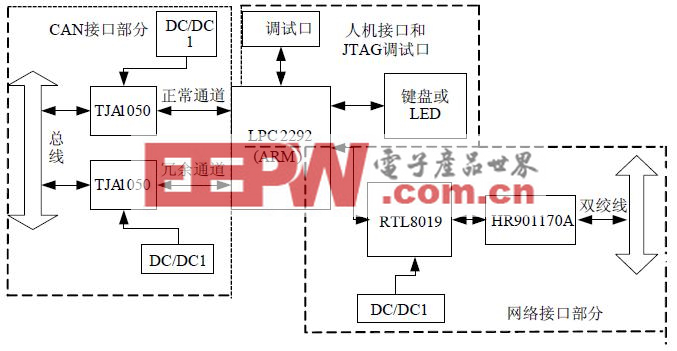
圖2 網絡硬件結構示意圖
2.4 人機接口
除了上面的主要部分外,還有LED 數碼管顯示和鍵盤部分,LED 用來顯示工作狀態,鍵盤根據具體實際情況修正總線波特率和網關的IP 地址。
3 軟件設計
3.1 引入RTOS
網關設計對系統的實時性要求比較高,而采用傳統的前后臺設計方法又會顯得過于復雜,實時性得不到保證。解決這個問題的最好方法就是采用實時操作系統RTOS 。目前世界上已有一大批成熟的嵌入式操作系統,其中μC/OS-II 操作系統是一種源代碼公開的嵌入式操作系統,具有代碼短小精悍、簡單易學的特點,針對網關的設計,這是一個理想的選擇。
μC/OS-II 完全是占先式的實時內核,是基于優先級的,即總是讓就緒態中優先級最高的任務先運行,因此實時性比非占先的內核要好。它的絕大部分代碼是用C 語言編寫的,可移植性強。
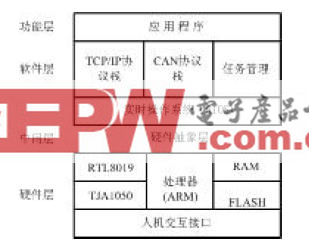
圖3 嵌入式計算機系統










評論