基于場效應管的直流電機驅動控制電路設計

4.2 電荷泵電路設計
本文引用地址:http://www.czjhyjcfj.com/article/87495.htm電荷泵的基本原理是通過電容對電荷的積累效應而產生高壓,使電流由低電勢流向高電勢。最早的理想電荷泵模型是J.Dickson在1976年提出的,當時這種電路是為可擦寫EPROM提供所需電壓。后來J.Witters,Toru Tranzawa等人對J.Dickson的電荷泵模型進行改進,提出了比較精確的理論模型,并通過實驗加以證實提出了相關理論公式。隨著集成電路的不斷發展,基于低功耗、低成本的考慮,電荷泵在電路設計中的應用越來越廣泛。
簡單電荷泵原理電路圖如圖4所示。電容C1的A端通過二極管D1接Vcc,電容C1的B端接振幅Vin的方波。當B點電位為0時,D1導通,Vcc開始對電容C1充電,直到節點A的電位達到Vcc;當B點電位上升至高電平Vin時,因為電容兩端電壓不能突變,此時A點電位上升為Vcc+Vin。所以,A點的電壓就是一個方波,最大值是Vcc+Vin,最小值是Vcc(假設二極管為理想二極管)。A點的方波經過簡單的整流濾波,可提供高于Vcc的電壓。

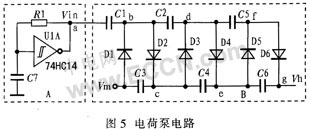
在驅動控制電路中,H橋由4個N溝道功率MOSFET組成。若要控制各個MOSFET,各MOSFET的門極電壓必須足夠高于柵極電壓。通常要使MOSFET完全可靠導通,其門極電壓一般在10 V以上,即VCS>10 V。對于H橋下橋臂,直接施加10 V以上的電壓即可使其導通;而對于上橋臂的2個MOSFET,要使VGS>10 V,就必須滿足VG>Vm+10 V,即驅動電路必須能提供高于電源電壓的電壓,這就要求驅動電路中增設升壓電路,提供高于柵極10 V的電壓。考慮到VGS有上限要求,一般MOSFET導通時VGS為10 V~15 V,也就是控制門極電壓隨柵極電壓的變化而變化,即為浮動柵驅動。因此在驅動控制電路中設計電荷泵電路,用于提供高于Vm的電壓Vh,驅動功率管的導通。其電路原理圖如圖5所示。
電路中A部分是方波發生電路,由RC與反相施密特觸發器構成,產生振幅為Vin=5 V的方波。B部分是電荷泵電路,由三階電荷泵構成。當a點為低電平時,二極管D1導通電容C1充電,使b點電壓Vb=Vm-Vtn;當a點為高電平時,由于電容C1電壓不能突變,故b點電壓Vb=Vm+Vin-Vtn,此時二極管D2導通,電容C3充電,使c點電壓Vx=Vm+Vin-2Vtn;當a點再為低電平時,二極管D1、D3導通,分別對電容C1、C2充電,使得d點電壓Vd=Vm+Vin-3Vtn;當a點再為高電平時,由于電容C2電壓不能突變,故d點電壓變為Vd=Vm+2Vin-3Vtn,此時二極管D2、D4導通,分別對電容C3、c4充電,使e點電壓Ve=Vm+2Vin-4Vtn。這樣如此循環,便在g點得到比Vm高的電壓Vh=Vm+3Vin-6tn=Vm+11.4 V。其中Vm為二極管壓降,一般取0.6 V。從而保證H橋的上臂完全導通。
4.3 電機驅動邏輯與放大電路設計
直流電機驅動電機驅動電路中電機驅動邏輯及放大電路主要實現外部控制信號到驅動H橋控制信號的轉換及放大。控制信號Dir、PWM、Brake經光電隔離電路后,由門電路進行譯碼,產生4個控制信號M1'、M2'、M3'、M4',然后經三極管放大,產生控制H橋的4個信號M1、M2、M3、M4。其電路原理圖如圖6所示。其中Vh是Vm經電荷泵提升的電壓,Vm為電機電源電壓。
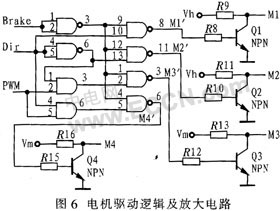
電機工作時,H橋的上臂處于常開或常閉狀態,由Dir控制,下臂由PWM邏輯電平控制,產生連續可調的控制電壓。該方案中,上臂MOSFET只有在電機換向時才進行開關切換,而電機的換向頻率極低,低端由邏輯電路直接控制,邏輯電路的信號電平切換較快,可以滿足不同頻率要求。該電路還有一個優點,由于上臂開啟較慢,而下臂關斷較快,所以,實際控制時換向不會出現上下臂瞬間同時導通現象,減小了換向時電流沖擊,提高了MOSFET的壽命。
直流電動機轉速n=(U-IR)/Kφ
其中U為電樞端電壓,I為電樞電流,R為電樞電路總電阻,φ為每極磁通量,K為電動機結構參數。
直流電機轉速控制可分為勵磁控制法與電樞電壓控制法。勵磁控制法是控制磁通,其控制功率小,低速時受到磁飽和限制,高速時受到換向火花和換向器結構強度的限制,而且由于勵磁線圈電感較大動態響應較差,所以這種控制方法用得很少。大多數應用場合都使用電樞電壓控制法。隨著電力電子技術的進步,改變電樞電壓可通過多種途徑實現,其中PWM(脈寬調制)便是常用的改變電樞電壓的一種調速方法。
PWM調速控制的基本原理是按一個固定頻率來接通和斷開電源,并根據需要改變一個周期內接通和斷開的時間比(占空比)來改變直流電機電樞上電壓的"占空比",從而改變平均電壓,控制電機的轉速。在脈寬調速系統中,當電機通電時其速度增加,電機斷電時其速度減低。只要按照一定的規律改變通、斷電的時間,即可控制電機轉速。而且采用PWM技術構成的無級調速系統.啟停時對直流系統無沖擊,并且具有啟動功耗小、運行穩定的特點。
設電機始終接通電源時,電機轉速最大為Vmax,且設占空比為D=t/T,則電機的平均速度Vd為:
Vd=VmaxD
由公式可知,當改變占空比D=t/T時,就可以得到不同的電機平均速度Vd,從而達到調速的目的。嚴格地講,平均速度與占空比D并不是嚴格的線性關系,在一般的應用中,可將其近似地看成線性關系。 在直流電機驅動控制電路中,PWM信號由外部控制電路提供,并經高速光電隔離電路、電機驅動邏輯與放大電路后,驅動H橋下臂MOSFET的開關來改變直流電機電樞上平均電壓,從而控制電機的轉速,實現直流電機PWM調速。
6 結束語
以N溝道增強型場效應管為核心,基于H橋PWM控制的驅動控制電路,對直流電機的正反轉控制及速度調節具有良好的工作性能。實驗結果表明,直流電機驅動控制電路運行穩定可靠,電機速度調節響應快。能夠滿足實際工程應用的要求,有很好的應用前景。

pwm相關文章:pwm是什么
電荷放大器相關文章:電荷放大器原理 電流傳感器相關文章:電流傳感器原理 脈寬調制相關文章:脈寬調制原理 施密特觸發器相關文章:施密特觸發器原理









評論