節(jié)能型循環(huán)泵控制器

摘要
本文引用地址:http://www.czjhyjcfj.com/article/265861.htm為了制造出更加節(jié)能高效、調(diào)控性能良好的空調(diào)、水泵等變頻電器,設計者不斷的提高電機控制技術。永磁同步電機( permanent magnet synchronous motor, PMSM)具有體積小、效率高、控制精度高、調(diào)速范圍寬等特點,已成為變頻控制領域的主流電機之一。為了實現(xiàn)高性能的轉(zhuǎn)速控制,PMSM 控制系統(tǒng)一般安裝有機械式速度/位置傳感器。但是機械式速度/位置傳感器的使用不僅增加了系統(tǒng)的成本,也使得 PMSM 體積變大。同時,復雜、惡劣的工作環(huán)境大大降低了速度/位置傳感器的可靠性。因此,為了降低系統(tǒng)成本,提高系統(tǒng)的可靠性等的要求,無速度/位置傳感器(一般簡稱無傳感器, sensorless)控制技術成為了當前的技術熱點。
基于無傳感器技術的永磁同步電機 PMSM 矢量控制調(diào)速系統(tǒng)結構簡單、易維護、體積小、成本低,能應用于一些特殊場合,因此成為了當前的研究熱點之一。無傳感器控制的核心是轉(zhuǎn)子位置和轉(zhuǎn)速估計,估計的精度和穩(wěn)定性決定了系統(tǒng)控制性能的優(yōu)劣。基于滑模觀測器(slide mode observer, SMO)的位置估計方法結構簡單、易于實現(xiàn),從而得到了廣泛的應用。
1986 年召開的第 25 屆決策和控制會議上,麻省理工學院的 J.J.Slotine 教授提出使用SMO 實現(xiàn)非線性估計問題,奠定了滑模觀測器應用與轉(zhuǎn)子位置估計的基礎。SMO 是利用滑模變結構控制系統(tǒng)對參數(shù)擾動魯棒性強的特點,將狀態(tài)觀測器中的控制回路用滑模變結構代替,從而達到良好的估計效果。滑模變結構是為控制系統(tǒng)預先在狀態(tài)控制上設計一個特殊的開關面,在系統(tǒng)變量從起始點運動到開關面之前,系統(tǒng)的控制結構維持一種形式;當系統(tǒng)變量達到開關面之后,開始自適應的調(diào)整率控制,最終使系統(tǒng)狀態(tài)沿著開關面一直滑動到平衡點,此時系統(tǒng)的控制結構又維持另一種形式。滑模變結構對參數(shù)變化及擾動有良好的魯棒性,且結構簡單、響應速度快,因此在 PMSM 位置估計中得到了廣泛的應用。
本文基于滑模觀測器在無位置傳感器電機控制系統(tǒng)中的應用展開討論,并給出無傳感器系統(tǒng)相應的軟硬件實現(xiàn)。
1、節(jié)能型循環(huán)泵控制器硬件系統(tǒng)
某隔離電源系統(tǒng)完成 DC/DC 的轉(zhuǎn)換,采用全橋拓撲,輸出電壓為 12V。其中,全橋的原邊側驅(qū)動器就采用了UCC27201,共計兩顆。
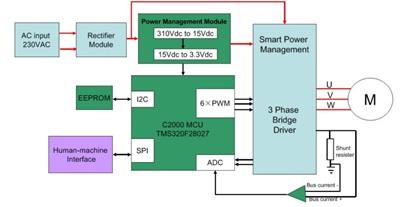
圖1-1 節(jié)能型循環(huán)泵控制器硬件系統(tǒng)
節(jié)能型循環(huán)泵控制器包括主電路模塊、控制電路模塊和人機交互模塊。
主電路模塊包括 EMC 濾波器、整流橋、集成功率器件和驅(qū)動的 IPM模塊。230Vac 市電經(jīng)過EMC 濾波器、整流橋整流后變?yōu)楦邏褐绷麟姡嗳珮蚰孀冸娐穼⒏邏褐绷麟娔孀優(yōu)槿嘟涣麟妼崿F(xiàn)對電機的控制。
控制電路模塊包括微控制器 F28027 的最小控制系統(tǒng)、兩路的定子電流檢測及調(diào)理電路、直流母線電壓檢測電路、過流保護電路、電源管理模塊。
人機交互模塊通過 SPI 通信和普通 I/O 口與 MCU 進行通信,可以實時顯示電機的轉(zhuǎn)速和電機功率等參數(shù),也可以通過按鍵設置電機的轉(zhuǎn)速給定值和輸出功率的的最大值。
1.1 主控芯片
節(jié)能型循環(huán)泵控制器控制系統(tǒng)的核心采用 Piccolo F2802x 系列微控制器 F28027 ,其內(nèi)核為高效 32 位中央處理單元 (CPU) (TMS320C28x),工作頻率高達 60MHz,具有多達 22 個具有輸入濾波功能可單獨編程的多路復用 GPIO 引腳和三個 32 位 CPU 定時器,片上集成 32K 字節(jié)的FLASH,16K 字節(jié)的 SRAM,1K 字節(jié)的 BOOT ROM和片上代碼保護模塊,分別用來存儲用戶編制的程序、數(shù)據(jù)、并實現(xiàn)系統(tǒng)的不同方式引導。自帶增強型的捕獲單元(eCAP)、6 路增強型PWM 產(chǎn)生單元(ePWM),12 位 16 通道的快速 ADC 單元以及其他一些通訊模塊如 SCI、SPI等,非常適合于電機控制。
F28027 芯片電路如圖 1-2 所示:
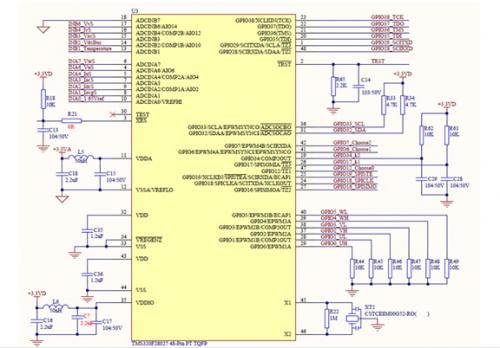
圖1-2 節(jié)能型循環(huán)泵控制器控制系統(tǒng)的核心F28027
1.2 定子電流檢測及調(diào)理電路
定子電流采樣電路將運行中的電流信號轉(zhuǎn)化為電壓信號,經(jīng)過加法和放大電路,RC 濾波后送到 F28027 的 A/D 轉(zhuǎn)換通道。電路將峰值-0.6A~+0.6A 的電流信號調(diào)理為 0~3.3V 的電壓信號,其中 0A 對應 1.65V,-0.6A 對應 0V,+0.6A 對應 3.3V。因為三相定子電流之和為 0,所以只需要測量兩相定子電流,另外一相可通過計算得到。定子電流信號的采樣由精密電阻來實現(xiàn)。圖 1-3 為其中一相的電流采樣及調(diào)理電路。
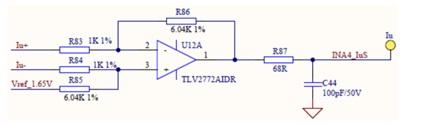
圖1-3 定子電流檢測及調(diào)理電路
矢量控制相關文章:矢量控制原理













評論