詳解運放及其補償技術

運放補償雖然很常見,但有時候也極具挑戰性,尤其是在要求和約束條件超過設計師控制的情況下,設計師必須選擇一種最優補償技術之時。也許極具挑戰性的原因之一是一般文獻資料更多地專注于不同補償技術之間的區別而不是相似性。
除了關注概念上的不同點外,還要關注相似點,這是非常明智的,只有這樣才能更好地理解明顯不同的技術和概念之間的緊密關系。為了達到這個目標,本文首先討論了運放的少量幾個確定因素,最終逐步過渡到電路中經常使用但少有人理解的補償技術。本文還簡要介紹了補償網絡的嚴格定義,并集中討論了文獻中出現的可能沖突。
前饋增益:相對于哪個節點?
在討論運放補償之前,首先搞清楚運放的兩種最基本配置很重要,即同相(圖1A)和反相(圖1B)。已有大量文獻資料介紹過這兩種配置的閉環增益,并強調了閉環傳輸函數間的區別。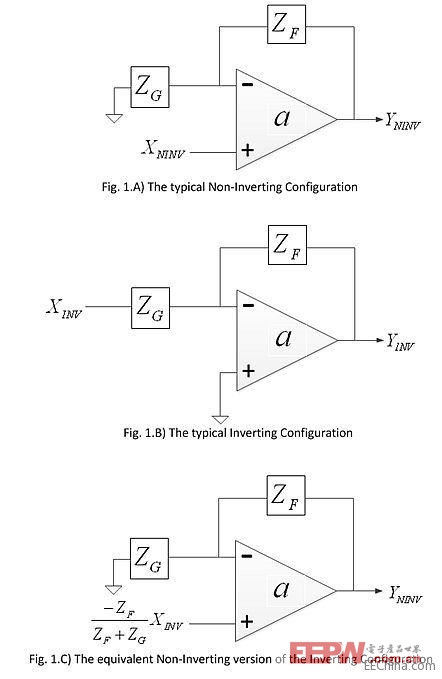
圖1A:典型的同相配置。
圖1B:典型的反相配置。
圖1C:反相配置的等效同相版本。
為了方便理解兩種配置的前饋增益之間的區別,這里給出了分別對應同相和反相配置的公式1.a和1.b.有人可能會問,為什么反相配置(AINV)的前饋增益不同于同相配置(ANINV),而事實上兩種配置使用的是相同的運放。
讓我們首先看看兩種配置實際上有多相似,然后說明前饋增益的純數學表達式為何不同。
圖1B中所示的反相配置可以轉化為圖1C所示的等效同相配置。這種轉換是確定同相配置要求的輸入后會產生與反相配置相同輸出的結果。
圖2A和圖2B分別對應圖1A和圖1C的框圖表示法。注意圖2A和圖2B之間的相似性。這兩張圖表明,當從減法模塊向輸出觀察時,兩種配置是完全相同的。減法模塊建模的是運放兩個輸入端的相減。
在反相配置框圖(圖2B)中,輸入信號(-XINV)先乘以ZF/(ZF+ZG)因子,然后到達減法模塊輸入端,命名為XINV,i.在圖2A和圖2B的兩個框圖之間,當嚴格相對于減法模塊輸入或運放輸入觀察時,前饋增益和反饋因子完全相同,兩種配置的區別僅是相對輸入信號觀察時輸入信號的數學轉換。因此兩種配置下的開環增益穩定性分析結果也是相同的。
通過使用線性系統處理方法,圖2B中的反相配置框圖可以映射為圖2C.圖2C中的框圖是對反相配置進行簡單數學處理的結果,不過圖2B中的子模塊更好地對應于實際物理系統的單元。與物理系統有更好的一對一對應關系的模型一般更容易讓人理解。圖2C是相對于信號源(-XINV)的反相配置的框圖表示法,因此公式1.b中所示的前饋增益表達式(AINV)對同相配置來說看起來不同于公式1.a的表達式。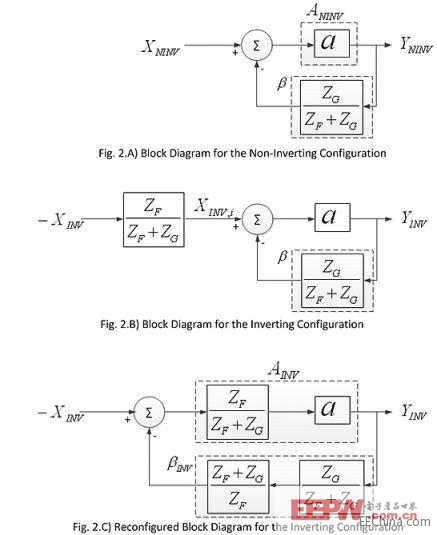
圖2A:同相配置框圖。
圖2B:反相配置框圖。
圖2C:針對反相配置的重配置框圖。
噪聲增益:不僅僅針對噪聲
為了方便理解,輸出噪聲(包括偏移量)通常以運放或放大器的輸入端為參考。一般來說,給定極性的輸出電壓完全以運放正輸入端為參考會導致輸入電壓與輸出電壓有相同的極性,而完全以負輸入端為參考會導致相反極性的輸入電壓。
從非相關噪聲模型角度看,噪聲電壓的符號或相位是不相關的,因此噪聲電壓的參考是運放的反相還是同相輸入端在數學上都是等效的。由于反相輸入端有反饋網絡,因此輸出噪聲完全以運放的同相輸入端為參考能夠很快得出同相放大器的有效且可識別的配置(圖1A)。這樣,以運放任一輸入端為參考的噪聲總體增益總是等于反相配置的閉環增益。
因此,即使采用了相對于信號源的反相配置,但以運放輸入端為參考的噪聲實際上只看到等于(1+ZF/ZG)的同相配置增益,一般稱之為噪聲增益(NG)。然而,如果噪聲源連接的是運放的正輸入端,就像同相配置中那樣,那么信號增益以及以輸入為參考的噪聲就完全等于噪聲增益。
補償技術:目的
運放補償技術有很多種,如“主極點補償”,“增益補償”,“超前補償”,“補償衰減器”以及“超前-滯后補償”。任何補償技術的理想結果都是從純穩定性角度使多極點系統(高階系統)接近單極點整體系統,因為單極點反饋系統是無條件穩定的。
大多數補償技術至少能實現有效的雙極點系統狀態,其中第二個極點(第一個非主要極點)盡可能遠離第一個極點(主要極點),并且通常具有較高的頻率拐點,而且拐點相對遠,對穩定性的影響可以忽略不計。在一些情況下,通過有意減小主要極點和非主要極點之間的距離來增強帶寬,這時通過增益頻率響應可以觀察到一些高頻峰值。
在許多電子技術文獻中,所有補償技術中解釋最不好的也許是超前-滯后補償技術了。遺憾的是,某些流行的參考文獻在開環增益曲線以及對超前-滯后補償的相關描述中存在錯誤,因此本文將重點討論這方面內容。
超前網絡的嚴格定義或至少清晰的定義是,它的零點頻率幅值比極點的要低,因此催生出純粹兩個拐點。在滯后網絡中則相反,極點頻率幅值比零點的低。超前-滯后網絡是這兩種網絡的組合,超前網絡的全部兩個拐點頻率的頻率幅值都要小于滯后網絡的頻率幅值。同樣,在滯后-超前網絡中,滯后網絡的兩個拐點的頻率幅值要小于超前網絡。不管是滯后-超前網絡還是超前-滯后網絡,每種網絡都會形成4個拐點:兩個極點和兩個零點。
在給定總體系統與技術約束條件下,人們也許會使用任何合適的補償網絡去補償具有與生俱來且有時不可修改拐點的系統。所選的補償技術可能專門用引入的零點去抵消固有的系統極點,反之亦然,從而得到一個純粹更低階的系統。本文采用開環增益表達式的Bode圖用于穩定性分析,并得出極點和零點的定義。
超前-滯后補償:實現
根據參考文獻給出的超前-滯后補償電路如圖3A所示。出于實用和簡單的目的,假設未補償運放有兩個固有極點:主極點(?p,dom)和第一個非主要極點(?p,nondom)。圖3B顯示了開環增益幅度圖,其中實線代表未補償運放的情況,顯示出了運放本身的固有拐點。
圖3A:針對反相配置的典型超前-滯后補償。
圖3B:針對超前-滯后補償的開環增益幅度圖。



評論