基于DSP的工業縫紉機控制系統設計方案

引言
本文引用地址:http://www.czjhyjcfj.com/article/257496.htm傳統的工業縫紉機,主軸驅動大多采用離合器電機,縫制過程中的動作都靠機械和人工配合完成,存在效率低、體積大、調速范圍窄、位置控制難、自動化程度低。另一方面,傳統的工業縫紉機,由于主軸驅動靠離合器電機,通電后不管機器是否正處于縫制狀態,電機都一直在高速運轉耗電,不能實現有縫制動作時機器運轉,沒有縫制動作時機器停止,從而造成了大量電能浪費。
近年來德國杜克普(DURKOOP),日本重機(JUKI),日本兄弟(BROTHER)等國外公司,相繼推出了縫紉機電腦控制系統,實現了縫制動作的自動化,大大提高了工作效率,降低了能耗,深受市場歡迎,但其價格一直居高不下,國內一般企業很難承受。為此開發低能耗、高可靠性,能實現較寬的調速范圍、精確快速的位置控制并且價格低廉的高速工業縫紉機控制系統,替代進口,將會具有很好的市場前景。
系統設計
系統設計完成的是整體電控縫紉機的總體技術方案,它是完成電控縫紉機設計的最關鍵的一個步驟,該電控系統主要包括控制器、驅動器、電機、編碼器、傳感器、電磁鐵等幾個部分,系統框圖如圖1所示。
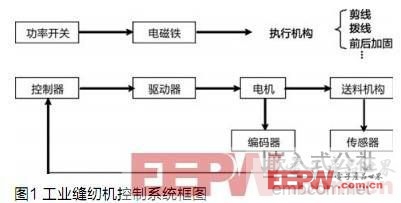
控制器
圖1的控制器作為工業縫紉機控制系統的核心,一方面產生伺服電機驅動信號,送給驅動器控制縫紉機完成定針位,并完成各種不同線跡的控制功能,另一方面產生開關信號給功率開關電路,完成縫紉機的剪線、撥線、前后加固、抬壓腳等動作。控制器的動作需要電機編碼器信號、機頭同步信號、腳踏板加減信號、電機電流傳感器信號等信號的參與運算,以協調整個機器完成相應動作。該控制器的硬件電路如圖2所示。
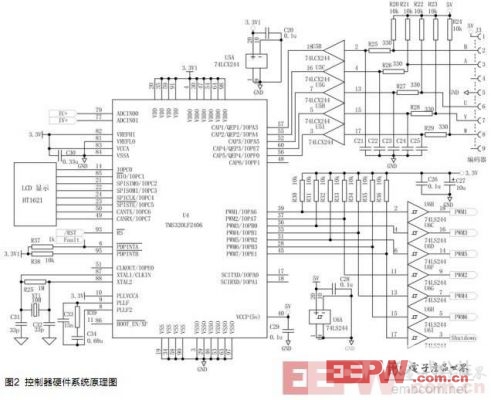
該控制器的主體核心采用TMS320F2406 DSP(U4)進行程序編程,以實現對永磁同步電機實行磁場定向控制。對永磁同步電機實行磁場定向控制的原理框圖如圖3。
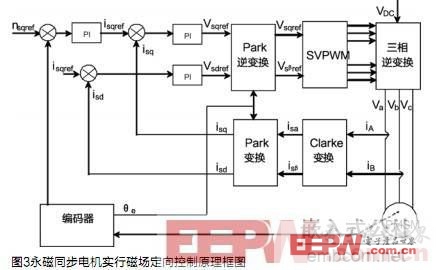
通過電流傳感器測量逆變器輸出的定子電流iA、iB,經過DSP的A/D轉換器轉換成數字量,并利用iC=-(iA+ iB)計算出iC。通過Clarde變換將電流iA、iB、iC變換成旋轉坐標系中的直流分量isq、isd,isq、isd作為電流環的負反饋量。
利用增量式編碼器測量電動機的機械轉角位移qm,并將其轉換成電角度qe和轉速n。電角度qe用于參與Park變換和逆變換的計算。轉速n作為速度環的負反饋量。
給定轉速nref與轉速反饋量n的偏差經過速度PI調節器,其輸出作為用于轉矩控制的電流q軸參考分量isqref。isqref和 isdref(等于零)與電流反饋量isq、isd的偏差經過電流PI調節器,分別輸出dq旋轉坐標系的相電壓分量Vsqref和Vsdref。 Vsqref和Vsdref再通過park逆變換轉換成a b直角坐標系的定子相電壓矢量的分量Vsaref和Vsbref。
當定子相電壓矢量的分量Vsaref、Vsbref和其所在的扇區數已知時,就可以利用電壓空間矢量SVPWM技術,產生PMW控制信號來控制逆變器。
以上操作可以全部采用軟件來完成,從而實現三相永磁同步伺服電動機的全數字實時控制。

伺服電機相關文章:伺服電機工作原理










評論