基于SLH89F5162的智能清潔機器人

一、項目設計背景及概述
清潔機器人是服務機器人的一種,所謂服務機器人是指自主或半自主的、從事非生產活動、能完成有益于人類健康的服務工作的機器人。家庭清潔機器人集機械、電子、傳感器、計算機、控制、機器入技術、人工智能等諸多學科為一體,能夠自動進行房間地面的家庭衛生服務。在一些發達國家的很多公共場合已經開始使用清潔機器人,隨著清潔機器人性價比的提高,清潔機器人進入家庭成為可能。
家用吸塵器作為當今家庭的主要的日常清潔工具,會與用戶形成頻繁的互動關系,產品和消費者產生一種直接的接觸與溝通。近些年,智能手機發展迅速并得到了廣泛的普及,成為許多人的生活與工作的必需品,如果能夠用手中的智能手機就完成對吸塵器的的有效控制,將會為人類的清潔工作帶來極大的便利。智能手機與清潔機器人結合,兼具智能手機良好的操作體驗和清潔機器人便利又高效的清潔作用。
此次深聯華單片機大賽提供的“三防”單片機給我們提供了一個很好的平臺來實現我們的想法,融合智能手機以及機器人領域的關鍵技術,本課題旨在開發一種成本低能夠充分滿足家庭需求且方便適用的智能家庭清掃機器人。使它可以替代傳統的家庭人工清掃方式使家庭生活電氣化、智能化使科技更好地為人類服務。
二、項目設計原理
2.1、原理概述
清潔機器人需要完成的任務是能夠在房間中自動清潔地面。工作時,利用各種傳感器測得環境信息,并做出決策,實現邊行走邊打掃,完成預定的任務。典型的清潔機器人主要由以下幾個模塊組成:
(1)信息采集模塊
(2)決策模塊
(3)運動控制模塊
(4)清掃模塊
這四個部分構成了完整的清潔機器人系統,如圖2-1所示。信息采集模塊返回當前清潔機器人的位置信息,如是否碰到障礙物、是否遇到樓梯等,然后把這些信息送給決策模塊進行決策,控制運動控制模塊,使機器人轉彎或者后退等,在機器人運動的同時讓清掃模塊進行清掃,完成打掃地面的任務。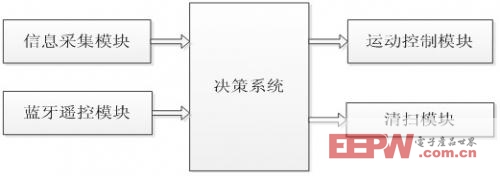
圖2-1清潔機器人系統典型組成示意圖
2.2、硬件設計原理
2.2.1機械結構設計
機器人本體的良好設計是實現其他各功能模塊的基礎。本文設計的清潔機器人采用三輪機構的車體,兩個動力輪,一個萬向輪,具有運動靈活,控制簡單的優點。
機器人在地面上移動的方式通常有三種:輪式、履帶式和步行式。步行移動方式模仿人類或動物的行走機理,用腿腳走路,對環境適應性好,智能程度也相對較高,但步行移動方式在機構和控制上比較復雜:履帶移動方式將環狀循環軌道履帶卷繞在若干滾輪外,使車輪不直接與地面接觸,履帶式的的優點是著地面積比車輪式大,所以著地壓強小,適于爬坡或者不平的地面;輪式移動方式是最常見的一種地面行進方式,其特點是:能高速穩定的移動,能量利用效率高,機構和控制簡單,但不能爬坡。本設計中清潔機器人只需在室內打掃,工作環境較好,所以采用輪式移動方式。
超聲波傳感器需要安裝在底盤上,且需要安裝在合適的位置并牢固可靠。本設計中將超聲波模塊直插在固定的電路板上,進而固定在底盤上。機器人行進時,主要是對要前行的路探測是否有障礙物,因此將超聲波模塊安裝在車身的最前端。
本系統選用雙軸HC02-48強磁電機,電機運行穩定,無抖動。扭力強勁130強磁直流減速電機,扭力為普通電機的2至5倍,電壓3-9V,變速箱1:48比速,小車最佳比速,速度與力量完美組合。
清掃機器人的吸塵技術有兩類:真空吸塵器和氣流濾塵器。真空吸塵器是由高速旋轉的風扇在機體內形成真空從而產生強大的氣流,將塵埃和臟物通過吸口吸入機體內的濾塵袋內。氣流濾塵器是一個全封閉系統,既無外部氣體吸入,也無機內氣體排除,其原理是利用附壁效應去形成低壓渦流氣體,最后將沉渣截留于吸塵器內的渦流腔內。
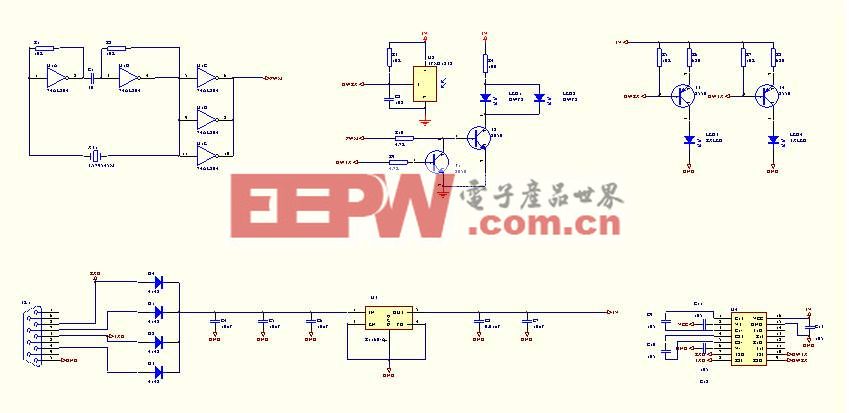
2.2.2硬件電路設計
根據清潔機器人功能要求,清潔機器人硬件系統包括單片機最小系統、電源模塊、電機驅動模塊、超聲波模塊、藍牙模塊。
本系統采用SLH89F5162作為核心控制芯片。采用了多種防破解技術。SLH89F5162單片機是一款功能比較強大的單片機,它擁有兩個全雙工串行通信接口,串口1的功能及操作與傳統51單片機串行口相同:特殊的是SLH89F5162單片機內部有一個獨立波特率發生器,串口1可以使用定時器1作為波特率發生器,也可以使用獨立波特率發生器作為波特率發生器;而串口2只能使用獨立波特率發生器作為波特率發生器。SLH89F5162是高速/低功耗/超強抗干擾的新一代8051單片機,指令代碼完全兼容傳統8051,但速度快8-12倍。內部集成3路PWM,8路高速10位A/D轉換,針對電機控制,強干擾場合。SLH89F5162單片機為整個控制系統核心,考慮各模塊的功能需求以及單片機各個I/O口的特性后。
硬件系統由以下幾個模塊構成:電源部分,負責提供穩定的5V電源;晶振電路,為系統提供時鐘;復位電路,按鍵后對系統進行復位:藍牙模塊,接收手機發送的控制信號;超聲波模塊,進行實時測距以躲避障礙物;驅動模塊,驅動電機工作,實現機器人的行走。
時鐘電路在單片機系統硬件設計中往往是一個關鍵的部分,由于晶振的工作頻率很高,設計不當就很有可能使其工作時的產生的高頻信號對其他電路造成干擾;若晶振工作不正常,則會導致整個單片機系統無法運行。SLH89F5162系列單片機的時鐘輸入接在其14(XTAL2)和15(XTAL1),通常是接一個12M的晶振體。晶振和單片機引腳之間的連線盡量要短,這樣可以保證其工作的穩定性和避免晶振的高頻信號過多的干擾周圍線路。晶振的下方和周圍盡量不要走線,尤其是對信號質量要求高的器件的線路。
單片機需要在上電之后給其一個復位信號才能正常工作,在開發和調試單片機系統時也往往要對它進行手動復位,而且當單片機系統供電電壓過低時,程序的運行會出現非正常的情況,要求在低壓時也必須對單片機系統進行復位。SLH89F5162單片機的RESET引腳為低有效,平時為上拉高電平,復位時,需要給其一定時間的低電平。
機器人系統要穩定工作必須有強健的電源供給作為保障,強大的電源可以使系統在各種環境下長時間穩定的工作,因此電源管理是整個系統可靠運行的基礎。本系統中電源分為功率和信號兩部分輸出,即單片機最小系統、超聲波傳感器接口、藍牙接口的電源由信號電源供應;電機驅動、微型吸塵器的電源由功率電源供應。




評論