一種基于超聲波測距原理的導盲系統設計

摘要:文章設計了一種基于超聲波測距原理的導盲系統。系統以STC125A60S2單片機為核心控制器件,利用渡越時間法測量經溫度傳感器DB18B-20補償后的距離,實現對盲人行走道路上障礙物距離的測量及定位,并通過SYN6658語音模塊進行語音播報導航。
本文引用地址:http://www.czjhyjcfj.com/article/249570.htm0 引言
根據最新研究報告,中國每年新增盲人大約45萬,預計到2020年我國視力殘疾人數將為目前的4倍,達5000余萬。由于生理上的缺陷,盲人在生活、工作等方面有著諸多不便。因此,將現今技術用于盲人導航是十分必要的。
超聲波具有方向性強、能量易于集中、傳播距離較遠及對障礙物定位精確等特點,其產品具有體積相對較小、方便攜帶、價格低廉等優點。因此采用超聲波測距及語音播報實現盲人導航,具有一定的實用價值。
1 超聲波測距的原理
1.1 超聲波測距方法
超聲波是指振動頻率大于20kHz以上的聲波。超聲波測距方法主要有相位檢測法、聲波幅值檢測法和渡越時間法三種。其中,相位檢測法精度高,但檢測范圍有限;聲波幅值檢測法易受反射介質的影響。因此,本設計采用渡越時間法測距。
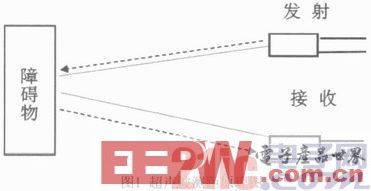
超聲波測距的工作原理:發射換能器向外發射超聲波,同時單片機開始計時,超聲波在介質中傳播的途中遇到障礙物后會立即反射回來,當接收換能器接收回波時單片機停止計時,從而得到計時器精確記錄的時間t,再根據渡越時間法求出目標障礙物距信號發射源的距離。
S=ct/2 (1)
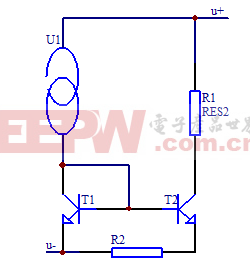
對一般流質媒質而言,聲波是一種縱波,傳播速度為:c=√E/ρ,其中E為媒質的彈性模量; ρ為媒質密度;c是復數,其實數部分代表傳播速度,虛數部分與衰減常數有關。超聲波測距原理圖如圖1所示。
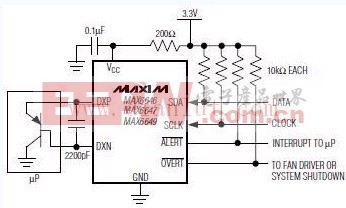
1.2 超聲波測距的溫度誤差分析
空氣密度越高,超聲波的傳播速度就越快,而空氣的密度又與溫度有著密切的關系,此溫度對測量精度有一定的影響。氣體中聲速受溫度影響最大,超聲波在空氣中傳播速度為
C=331.4×1+T/273 (2)
其中T為環境攝氏溫度,因此我們需要采用測溫模塊對溫度產生的影響進行補償。
2 系統硬件設計
2.1 總體設計
本系統由STC12C5A60S2單片機、超聲波發射電路模塊、回波接收電路模塊、測溫模塊、語音模塊五大部分組成。如圖2所示。
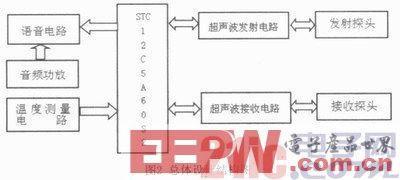
STC12C5A60S2單片機是本系統的核心,控制各個模塊協調工作。通過單片機的P1.0引腳控制超聲波發射電路模塊產生40 kHz的脈沖信號,并驅動超聲波傳感器發射超聲波。當第一個脈沖發射結束后,啟動計數器開始計時,超聲波回波信號通過放大和判別后送到單片機的外部中斷器,單片機一旦接收到回波信號,便產生外部中斷。單片機STC12C5A60S2停止計數器計數,從而得到超聲波的在空氣介質中的傳輸時間t,最后通過溫度補償,利用式(1)計算出發射點距障礙物的距離,并通過語音模塊播報提示。
2.2 超聲波發射電路設計
由于NE555集成芯片搭建電路簡單、需用元件少、容易實現,并且產生波形失真度小,故本系統采用NE555集成電路作為發射電路。根據上述,知發射端工作頻率為40kHZ,采用NE555芯片構成時基電路及外圍元件構成多諧振電路,通過調節電阻R3的值從而改變頻率。其工作電路如圖3所示。
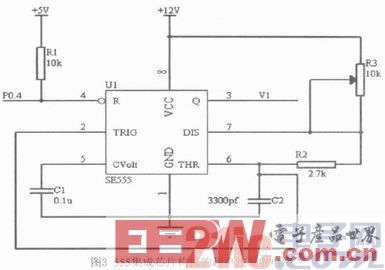
圖3中555定時器構成的多諧振蕩器,復位端4由單片機的P0.4口控制,當單片機給低電平時,電路停振;當單片機給高電平時電路起振接通電源后,電容C2來不及充電,6腳電壓Uc=0,則Uc=1,此時555芯片內部的三極管VT處于截止狀態。這時Vcc經過R3和R2向C2充電,當充至Uc=2/3 Vcc時,輸出翻轉U1=0,VT導通;這時電容C2經R2和VT放電,當降至Uc=1/3Vcc時,輸出翻轉U1=1。C2放電終止、又重新開始充電,周而復始,形成振蕩。其振蕩周期與充電時間tPH和放電時間tPL有關,振蕩周期為:

由式(4)可知,555多諧振蕩器的振蕩頻率由R2、R3、C2來確定。在電路設計時,先確定C2、R2的取值,即C2=3300pf,R2=2.7 KΩ。再將C2和R2的值代入式(4)可知:
為增大U1的輸出功率,將555芯片的8腳接+12V的電壓,同時將其復位端4接高電平。通過調節電位器R3的阻值,使輸出波形的頻率為40k HZ。
2.3 接收端電路設計
鑒于回波信號的變化范圍較大,因此對放大電路的增益提出了兩個要求:一是放大增益要大,以適應小信號的需要;二是放大增益能變化,以適應信號變化范圍大的需要。
由于回波信號為40kHZ交流信號,頻率較高,當回波信號放大時,放大器必須具有良好的交流特性,以提高信號的放大精度。鑒于該接收電路具有信號的轉化、放大、檢波、整流等特性。因此,我們設計了如圖4所示的回波接收電路。
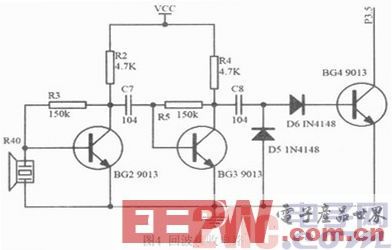
信號流程:當R40收到超聲波時,R40將超聲波信號變為電壓信號,此信號電壓加到BG2的基極,經BG2放大后從集電極輸出,經C7耦合到BG3基極,被BG3放大后從集電極輸出,被C8、D5、D6組成的倍壓檢波電路變為直流電壓。雙倍于交流信號電壓的直流信號電壓加到BG3的基極,BG3再放大后由P送往后繼電路。

手機電池相關文章:手機電池修復
斷路器相關文章:斷路器原理
高壓真空斷路器相關文章:高壓真空斷路器原理 塵埃粒子計數器相關文章:塵埃粒子計數器原理 溫濕度控制器相關文章:溫濕度控制器原理 漏電斷路器相關文章:漏電斷路器原理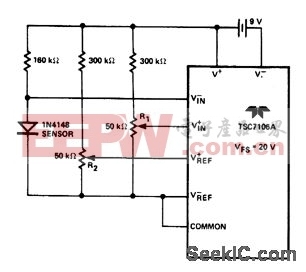



評論