一種基于MLX90316的磁性角度傳感器的設計方案

為實現惡劣環境下角度值的測量,分析了各類角度傳感器的優缺點,本文介紹了一款基于MLX90316的非接觸式、低成本、高分辨率,高抗干擾的磁性角度傳感器的設計方案。
本文引用地址:http://www.czjhyjcfj.com/article/249526.htm本方案中所設計的整個系統重點分析了信號采集模塊的實現原理和影響測量精度的機械結構,通過微處理器實現角度值的解算,在此基礎上編寫軟件算法。實驗證明本方案所設計的角度傳感器的精度能達到0.5°,可廣泛運用于汽車、電機等工業領域中,滿足所要求的技術指標。
1.引言
角度傳感器廣泛應用于汽車、機械、航空、航天、航海、工業自動化等領域。它主要分為接觸式和非接觸式兩種,由于接觸式的角度傳感器隨著使用時間的增長,會存在機械磨損、精度降低、經常維修甚至更換新設備等缺點,這不僅提高了生產成本還容易使被測設備的質量沒保證,而非接觸式角度傳感器則克服了這些缺點。常用的非接觸式角度傳感器有光電式和磁電式的。光電式的雖然精度比磁電式的高,但對環境要求苛刻、抗震性也較差,因此也就不適用于環境較復雜的工業場所。正是基于這些問題,設計一種基于磁電式的角度傳感器,它具有成本低廉,抗干擾性高,分辨力在0.5°以內等優點。
2.系統總體設計原理
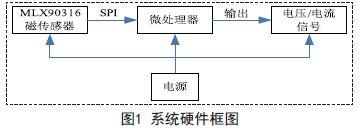
整個系統有四部分組成,分別為電源模塊,磁傳感器信號采集模塊、微處理器模塊、信號輸出模塊,硬件框圖如圖1所示。
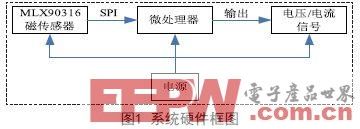
磁傳感器信號采集模塊主要通過集成有雙軸霍爾元件的集成芯片感知角度的變化,并以模擬信號或數字信號方式輸出到微處理器中,經過一定的編碼和解碼,由微處理器輸出工業用的電壓或電流信號,或者以串口通信方式輸出數字信號。為了減小系統的復雜度和誤差來源,信號采集單元選擇Melexis公司的MLX90316芯片。它屬于CMOS霍爾傳感器,可以輸出與芯片表面平行的磁場相對應的角度位置信息,并以SPI的串行通信方式輸出數字信號,省去了A/D轉換電路,這極大的減小了系統設計的復雜度。微處理模塊選用Freescale公司的MC9S08DZ60,它是一款小體積、低成本、低功耗和較多外部接口的16位微處理器。
它具有24路12位的A/D通道、控制器區域網絡(MSCAN)、串行外圍設備接口模塊(SPI)、串行通信接口(SCI/USART)、內部集成電路總線(IIC)等外設數字接口,很適合與外界進行數字信號通信。
3.機械結構設計
角度傳感器的機械結構主要有三部分組成,分別為旋轉軸、磁鐵和檢測電路。其結構如圖2所示。
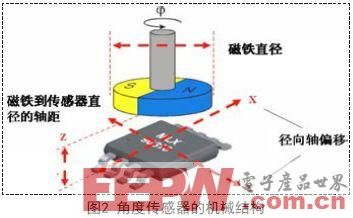
旋轉軸、磁鐵和傳感器位置的機械偏差將決定系統測量的精確度。相比于理想的Sine和Cosine輸出曲線,機械誤差可以導致附加的電壓偏移、相位偏移、幅度變化以及非線性誤差等。
磁鐵到傳感器軸距的下限由飽和效應(電氣或磁場)所決定,上限由信噪比、信號與偏移電壓的比例來決定。
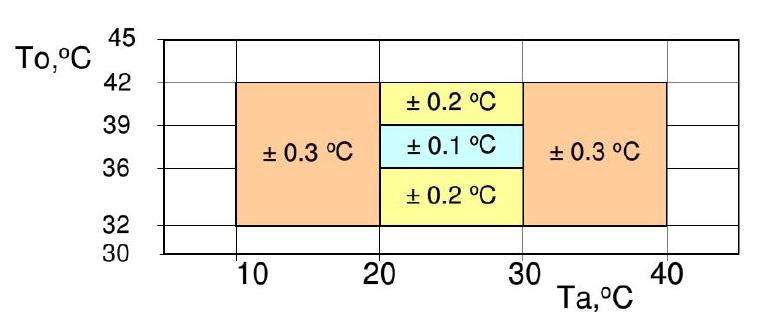
由于旋轉軸在運動過程中產生的機械磨損以及震動產生的軸偏移位置都將導致角度輸出信號的非線性,圖3揭示了磁鐵軸心的非線性度導致的角度誤差。

由圖3可知磁鐵的軸心偏離的越大,最終輸出的角度誤差越大,因此要保證輸出角度的精度,所選取的磁體的軸心的偏離度應滿足一定的同心度。
4.硬件電路設計
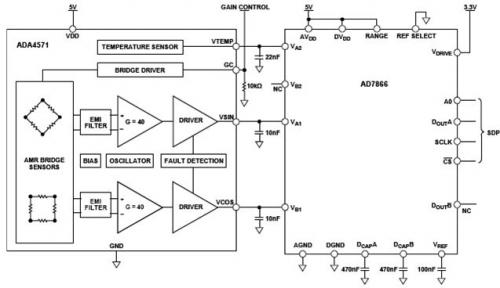
硬件電路的核心是磁傳感器信號采集模塊,它主要是利用磁傳感器芯片MLX90316來實現的,它可以把磁場的變化轉化為角度信息。信號采集電路如圖4所示。
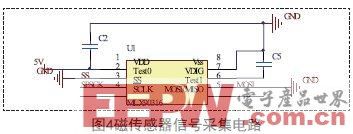
MLX90316芯片是集成了Tria度isTM型的CMOS霍爾傳感器,當外加磁場的分量與芯片表面平行時則可輸出兩路正交磁場信息,根據這一特點可以獲得對應的角度位置信息,它的內部結構如圖5所示。
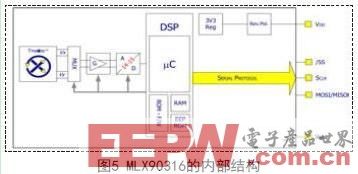
當小型磁鐵(徑向磁化)在芯片表面上方旋轉時,MLX90316芯片內的集磁片(IMC)可以將平行作用于芯片表面的磁場集中起來,并在IMC結構的邊緣產生正比于磁場的垂直分量,再通過兩對位于IMC下方的傳統平面霍爾元件來檢測此信號。這兩對霍爾元件的放置方向相互垂直,并都平行于芯片表面(X軸和Y軸方向),通過這樣的結構可以將實際角度編碼為兩個相位差為90°的正弦信號x V和y V ,并正比于磁場強度。

傳感器相關文章:傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器工作原理
風速傳感器相關文章:風速傳感器原理 霍爾傳感器相關文章:霍爾傳感器原理




評論