一款基于DSP的循跡及自平衡的智能小車設計

摘要:本系統選用TI公司32位DSPTMS320F28027作為控制芯片,設計制作了一款能夠循跡并尋找平衡的智能小車。根據所給定的跑道和跑道上的位置標志對小車進行硬件設計和程序編寫。循跡分為前后各4路循跡,采用的是4路紅外循跡模塊,保證了小車能夠前進后退均在指定路線上。
本文引用地址:http://www.czjhyjcfj.com/article/248192.htm關鍵詞:TMS320F28027芯片;紅外循跡;傾角傳感器;模數轉換器
引言
本系統選取了32位TMS320F28027作為運動物體的控制中心。TMS320F28027具有豐富的資源,擁有32位架構、高級外設、高度的模擬集成、高達128 KB的快閃存儲器,同時還包括功能強大的ADC、高分辨率PWM以及濕著增強的捕獲單元等眾多特性優異的組件、高精度片上振蕩器、模擬比較器、上電復位與掉電保護等在內的各種集成模塊。本文以電動車蹺蹺板的設計為例,介紹了TMS320F28027的PWM電機調速、A/D采樣、中斷和I/O口等的操作和控制,以及LCD、L298n、紅外循跡等外部擴展硬件的連接技巧和方法。
1 小車功能介紹
1.1 按鍵和顯示功能
按鍵操作:使用3個按鍵分別進行選擇、確認、退出功能操作,在系統上電后,顯示界面進入主菜單,通過“選擇”按鍵塒“板上尋平衡”、“上板尋平衡”兩個功能進行選擇,選定結束按下“確認”鍵,系統進入對應函數,此時可以按下“退出”鍵退出對應的功能函數。
顯示功能:LCD實時顯示小車的傾角和小車正在執行的功能,成功完成一項操作后LCD給出“OK”的指示,同時在每項操作進行時顯示其操作所用時間,完成所有任務后顯示出每項操作所耗時間。
1.2 “板上尋平衡”功能
在不加配重的情況下,電動車完成以下運動:
①電動車從起始端點A出發,快速行駛到中心點C附近;
②電動車在中心點C附近盡快使蹺蹺板處于平衡狀態,保持平衡5 s,并給出明顯的平衡指示;
③電動車從步驟②中的平衡點出發,快速行駛到蹺蹺板末端B處(車頭距蹺蹺板末端B不大于50 mm);
④電動車在B點停止5 s后,快速倒退回起始端A,完成整個行程;
⑤在整個行駛過程中,電動車始終在蹺蹺板上,并分階段實時顯示電動車行駛所用的時間。
其中,到達C點附近和倒退回A點有紅外循跡裝置配合循跡標志完成,尋找平衡主要由傾角傳感器檢測小車狀態控制小車前后移動完成。
1.3 “上板尋平衡”功能
將配重固定在可調整范圍內任一指定位置,電動車完成以下運動:
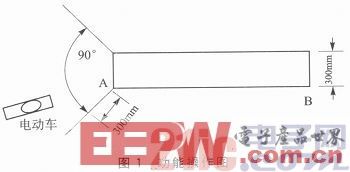
①將電動車放置在地面距離蹺蹺板起始端A點300 mm以外、90°扇形區域內某一指定位置(車頭朝向蹺蹺板),電動車能夠自動駛上蹺蹺板,如圖1所示。
②電動車在蹺蹺板上取得平衡,給出明顯的平衡指示,保持平衡5 s以上。
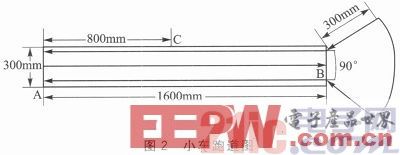
③將另一塊質量為電動車質量10%~20%的塊狀配重放置在如圖2所示中A至C間指定的位置,電動車能夠重新取得平衡,給出明顯的平衡指示,保持平衡5 s以上。
1.4 跑道和小車介紹
(1)小車跑道
跑道分為兩個部分:矩形部分的蹺蹺板和扇形部分的地面區域。圖2中兩側箭頭代表循跡標識,蹺蹺板中間箭頭為后退的循跡標識。在蹺蹺板中部C點放置蹺蹺板支架,保證蹺蹺板可自由擺動。
(2)小車循跡模塊安裝位置
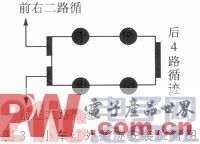
主要介紹小車循跡模塊的安裝位置,以保讓小車能夠正確循跡。前進循跡由小車前部左右各兩路的紅外循跡裝置完成,位置配合蹺蹺板上前進循跡線安裝。后退循跡由小車后部的4路紅外循跡裝置完成,位置配合蹺蹺板上后退循跡線安裝。安裝位置如圖3所示。
2 功能模塊電路連接
2.1 系統總體模型
TI公司32位DSP TMS320F28027為系統的控制芯片,系統通過7 V穩壓直流電源給電機供電,同時7 V穩壓電源經LM8965穩壓模塊輸出5V電壓后給其他模塊供電。在上電過后使用獨立按鍵配合LCD12864實現功能選擇,選擇功能結束,小車在紅外循跡模塊的引導下到達指定地點開始尋找平衡,此時系統對傾角傳感器輸出電壓進行A/D采樣并將數據傳輸給芯片處理,然后芯片輸出信號對L298N驅動的直流電機進行調節,配合光電碼盤控制小車在蹺蹺板上移動以實現平衡點尋找。系統框圖如圖4所示。

2.2 L298N驅動連接電路
L298N是一塊雙H橋直流電機驅動芯片,主要是對直流電機進行PWM轉速調節,對步進電機進行PWM細分操作。驅動部分的端子電壓Vs在+5~+35 V,承載最大電流為2 A;邏輯部分的工作電壓為5~7 V,電流為0~36 mA,低電平有效值為-0.3~1.5 V,高電平有效值為2.3 V~Vss。該驅動板可驅動2路直流電機,使能端ENA、ENB為高電平時有效,設置IN1和IN2的輸入電平確定電機的轉動方向,改變輸入使能端PWM脈沖的占空比實現調速。(注意:當使能信號為0時,電機處于自由停止狀態;當使能信號為1,且IN1和IN2為00或11時,電機處于制動狀態,阻止電機轉動。)
由于小車采用的是左右兩側速度差轉向,所以為了節省I/O口,電機連接時使用一個I/O配合使能端控制一側的兩個電機的轉向和轉速使能端控制轉速,I/O口控制轉向。具體操作:同側的兩個電機并聯,電機一端通過I/O口經L298N控制,另一端從同一I/O口引出一根信號線經一非門后由L298N控制。具體電路連接如圖5所示(其中MG1~MG4為4個直流電機)。

pwm相關文章:pwm是什么
模數轉換器相關文章:模數轉換器工作原理
傾角傳感器相關文章:傾角傳感器原理









評論