MEMS陀螺儀概況介紹

1、微機械陀螺儀的工作原理
MEMS陀螺儀利用科里奧利力(Coriolis force,又稱為科氏力)現象。科氏力是對旋轉體系中進行直線運動的質點由于慣性相對于旋轉體系產生的直線運動的偏移的一種描述。
科里奧利力來自于物體運動所具有的慣性,在旋轉體系中進行直線運動的質點,由于慣性的作用,有沿著原有運動方向繼續運動的趨勢,但是由于體系本身是旋轉的, 在經歷了一段時間的運動之后,體系中質點的位置會有所變化,而它原有的運動趨勢的方向,如果以旋轉體系的視角去觀察,就會發生一定程度的偏離。
2、微機械陀螺儀的性能參數
MEMS陀螺儀的重要參數包括:分辨率(Resolution)、零角速度輸出(零位輸出)、靈敏度(Sensitivity)和測量范圍。這些參數是評判MEMS陀螺儀性能好壞的重要標志,同時也決定陀螺儀的應用環境。
分 辨率是指陀螺儀能檢測的最小角速度,該參數與零角速度輸出其實是由陀螺儀的白噪聲決定。這三個參數主要說明了該陀螺儀的內部性能和抗干擾能力。對使用者而 言,靈敏度更具有實際的選擇意義。測量范圍是指陀螺儀能夠測量的最大角速度。不同的應用場合對陀螺儀的各種性能指標有不同的要求。
3、微機械陀螺儀的結構
MEMS陀螺儀的設計和工作原理可能各種各樣,但是主要都采用振動部件傳感角速度的概念。絕大多數的MEMS陀螺儀依賴于相互正交的振動和轉動引起的交變科里奧利力。圖3所示為振動陀螺的動力學系統的簡單結構示意圖。
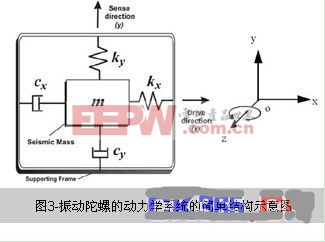
該系統為2-D的振動系統,有兩個正交的振動模態。其中一個振動模態為質量塊在x方向振動,振動頻率為 。另一個振動模態為質量塊在y方向振動,振動頻率為 。 與 的值比較接近。
工作時,驅動質量塊使之在x軸上以接近于 的頻率 (驅動頻率)振動,如果振動系統以角速度 繞Z軸轉動,則會產生一個沿Y軸方向的科里奧利力,從而使得質量塊在Y軸方向上產生頻率為的 振動響應,通過測試Y軸方向的運動就能完成角速度 的檢測。
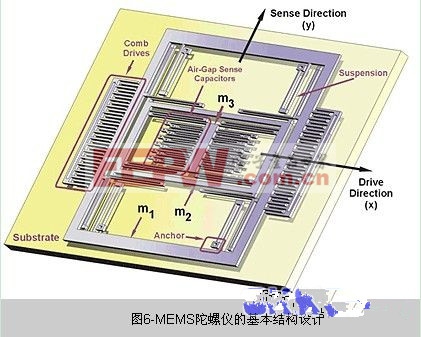
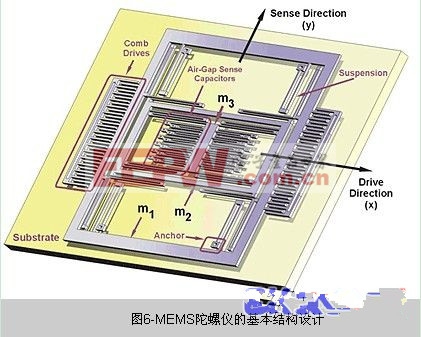
一般的MEMS陀螺儀由梳齒結構的驅動部分(圖4)和電容板形狀的傳感部分(圖5)組成,基本結構如圖6所示。對于各種應用要求有各種不同的具體結構設計。



.jpg)








評論