基于占空比模糊控制的光伏發電系統MPPT技術

目前實現MPPT的方法有恒定電壓(CVT)法,擾動觀察(PO)法及增量電導(INC)法等。文中研究光伏發電系統中的MPPT問題,基于模糊控制理論,即利用模糊集合的基本概念和連續隸屬度函數的理論,提出了占空比模糊控制干擾觀察法。通過MATLAB/Simulink建模仿真,實現在任意外界環境下最大功率點的跟蹤,并與非模糊控制的占空比干擾觀察法相比較,結果表明該方法在快速性和穩定性方面取得了更好的效果。
1 光伏電池的數學建模
光伏電池模型通常要求僅采用廠家提供標準條件(光照強度Sref=1000W/m2,電池溫度Tref=25℃)下的光伏電池板測試參數Isc、Uoc、Im、Um,并且要在滿足工程精度的情況下盡可能地簡化模型。
式中,Isc為標準條件下光伏電池的短路電流;Uoc為標準條件下光伏電池的開路電壓;Im為標準條件下光伏電池的最大功率點電流;Um為標準條件下光伏電池的最大功率點電壓。因此,只要知道這4個參數,就可以得到在標準條件下的光伏電池I—V特性曲線。
假定光伏電池特性曲線基本形狀不變,根據標準條件下的Isc、Uoc、Im、Um和任意的光照強度、環境溫度等參數,可以計算出任意外部環境下的Isc’、Uoc’、Im’和Um’,得到光伏電池模型:


2 占空比模糊控制實現MPPT
2.1 算法原理
基于占空比擾動觀察法原理,目標量為:光伏陣列的輸出功率P;控制量為:Boost電路的占空比D。
根據功率值變化量△P(n)=P(n)-P(n-1)和n-1時刻的占空比調整步長△D(n-1),決定當前時刻的調整步長大小△D(n)。光伏發電系統的模糊控制原理圖如圖1所示。
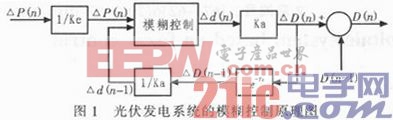
圖1中,輸入△P(n)表示第n時刻與前一時刻輸出功率差的實際值,△p(n)表示△P(n)對應于模糊集論域中的值;輸入△D(n-1)表示第n-1時刻占空比D調整步長的實際值,△d(n-1)表示△D(n-1)對應于模糊集論域中的值。輸出△D(n)表示第n時刻占空比D調整步長的實際值,△d(n)表示△D(n)對應于模糊集論域中的值;D(n-1)表示第n-1時刻占空比的實際值,D(n)表示第n時刻占空比的實際值.e-Ts為一個單位延遲環節,Ke、Ka分別表示功率差和調整步長的量化因子。
在每一次尋優周期開始時,采樣當前時刻的輸出功率值P(n)和前一時刻調整步長△D(n-1),計算當前時刻P(n)和前一時刻P(n-1)的差值△P(n),并對△P(n)和△D(n-1)進行量化,得到模糊集論域中的變量△p(n)和△d(n-1),將其作為模糊控制器的輸入,通過模糊推理得到當前時刻的調整步長△d(n),經重心法反模糊化后,得到控制量占空比調整步長△D(n)的實際值,再與當前時刻的占空比D(n-1)相加得到下一時刻的占空比D(n),調整光伏陣列的輸出電壓和功率,然后就進入下一次的尋優周期。不斷重復上述過程,直到輸出功率差△P(n)達到精度要求,即,到達了光伏系統的最大功率點。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理
cvt相關文章:cvt原理
光伏發電相關文章:光伏發電原理




評論