FPGA高速硬件在環(huán)仿真器實(shí)現(xiàn)電機(jī)控制器測(cè)試

b. 將部分計(jì)算量移至主機(jī)
電機(jī)仿真過程涉及一些除法操作,如 。此類操作不涉及電流等時(shí)變參數(shù),因此用戶無(wú)需每步都更新該值。用戶可將這個(gè)除法操作移至主機(jī)來運(yùn)算,避免在FPGA中進(jìn)行除法運(yùn)算的棘手問題。
。此類操作不涉及電流等時(shí)變參數(shù),因此用戶無(wú)需每步都更新該值。用戶可將這個(gè)除法操作移至主機(jī)來運(yùn)算,避免在FPGA中進(jìn)行除法運(yùn)算的棘手問題。
因此針對(duì)定點(diǎn)電機(jī)模型共需兩個(gè)VI。主機(jī)VI處理一些除法操作及參數(shù)轉(zhuǎn)換工作;FPGA VI用于仿真目標(biāo)的定點(diǎn)電機(jī)模型。
案例
下圖顯示了定點(diǎn)PMSM模型在加速及減速過程中的速率及電磁轉(zhuǎn)矩。
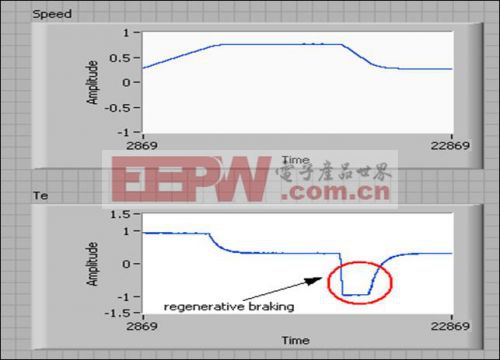
用戶可在上圖中觀察到減速階段的再生制動(dòng)效應(yīng)。當(dāng)電機(jī)將能量回饋給DC電源(電池)時(shí),電磁轉(zhuǎn)矩為負(fù)值。
結(jié)論
本文介紹了基于LabVIEW FPGA的電機(jī)驅(qū)動(dòng)仿真器,可以用來幫助用戶通過NI-RIO硬件創(chuàng)建高速電機(jī)驅(qū)動(dòng)HIL測(cè)試。









評(píng)論