利用80C552構成的噪聲測量自動定位裝置的

1 引 言
噪聲對人體健康有著嚴重的危害,因此如何減少噪聲危害已成為當前一項迫切的任務。精確的測量、分析噪聲將為控制噪聲源、改進產品設計工藝、制定環保措施和相關法律提供重要依據。在辦公自動化、計算機等新技術日新月異發展的今天,人們同樣把對辦公自動化設備的噪聲處理倍加關注,在相應的環保標準中噪聲作為一項重要指標。在噪聲測量方面大都采用分布采點的方法來進行測量。但是測量點選擇只是通過簡單的投影量距的方法,每次測量都需人工去測量調整聲級計測量頭與被測物之間距離,因此工作量大而且耗時耗工。
本文介紹一種噪聲自動定位系統可以減小工作量并且精度高,他是由80C552[1]單片機為核心與DME2000[2]光電距離檢測器構成的自動定位裝置來進行噪聲測量,通過LCD顯示工作狀態具有很高的性能價格比,極具推廣價值。
2 基本原理
(1) 噪聲物理度量參數
噪聲與聲音是相同的,只不過噪聲是頻率更為復雜的聲音而已,通過常用的聲壓級、聲強級和聲功率級來表示噪聲的強弱,用頻譜或頻率來表示噪聲的高低。在實際測量中一般用聲功率表示噪聲特征:
Lp= 10lgP/P0
其中:Lp為聲功率級(dB);
p為聲功率;
p。為參考基準聲功率(10-12W)。
但在實際測量中聲功率不是直接測得的,只能在特定的測試條件下由測得的聲壓級經計算得到,在辦公自動化產品測量中一般采用自由場條件工程法。其中在反射面上自由聲場條件下,聲壓級與聲功率級的關系為:
Lp=Lp+10lgS/S0-K2
其中:Lp為測試表面的平均聲壓級(dB);
S為測試表面積(m2);
s。為基準表面積(1 m2);
K2為環境引起的修正值。
(2)測試方法
在噪聲的測試中,以靜電復印機噪聲測試為例,測量點選擇用一個剛好能包羅聲源的最小矩形六面體表面(或球面體、半球面體)作為基準測量表面,具體測量原則:只要測量點中最大、最小聲壓級之差不超過測量點數。
(3)自動定位裝置
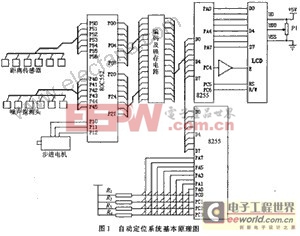
自動定位系統的基本原理如圖1所示,利用距離傳感器測量被測物(復印機)的距離,由單片機控制步進電機調整聲級計與被測物的距離。其中距離傳感器采用DME2000光電距離檢測器,DME2000發射紅色一2級光(對人眼安全),距離值可通過模擬量或RS232進行傳輸,利用其直接反射模式可以以非接觸方式測量并且不受物體反射情形的影響,幾乎任何物體表面如堅硬、液面、粉狀等物體均可測量,檢測分析度為0.125mm,精度為±5mm。測量誤差隨被測物反射的減少而增加,但這一情況可由可選積分系數的積分器加以補償。
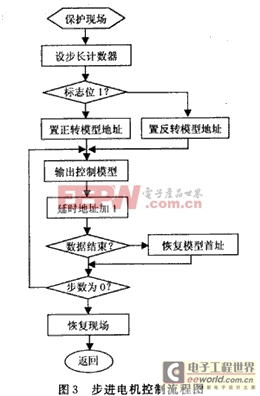
利用步進電機可以進行可逆距離的調整,由步進電機原理可知,步進電機各相繞組通電順序不同,轉動方向就不同。步進電機控制程序的主要任務是:判斷旋轉方向,按順序送出控制脈沖,以及判斷所要送出脈沖信號是否已經送完。設步進電機所要走的總步長放在寄存器R4中,轉向標志存放在程序狀態寄存器中標志位F0(即PSW.5H)中,當F0為0時,表示步進電機正轉;當F0為1時,表示步進電機反轉。在2DH單元內存放結束標志00H字。各點的距離情況可由鍵盤選擇由LCD顯示。步進電機控制程序清單如下:
CONTROLl: PUSH A
MOV R4,#N
CLR C
ORL C,PSW.5
JC ROTE
MOV R0,#20H
AJMP LOOP
ROTE: MOV R0,#H27
LOOP: MOV A,@R0
MOV P1,A
ACALL DELAY
INC R0
MOV A,#00H
ORL A,@R0
JZ TPL
LOOP1: DJNZ R4,LOOP
POP A
RET
TPL: MOV A,R0
CLR C
SUBB A,#61
MOV R0,A
AJMP LOOP1
DELAY: MOV R2,#M
DELAY1: MOV A,#M1
LOOP2: DEC A
JNZ LOOP2
DJNZ R2,DELAY1
RET
單片機控制的自動定位裝置工作流程圖如圖2所步進電機控制流程圖如圖3所示。
3 結 語
本文介紹了利用80C552單片機與DME2000構成的噪聲測量自動定位裝置,他可省去每次人工量距的麻煩并且精度高,利用LCD顯示自動定位情況更加方便,他不但可以作為辦公自動化噪聲測量裝置也可應用于大型機械監測。
噪聲對人體健康有著嚴重的危害,因此如何減少噪聲危害已成為當前一項迫切的任務。精確的測量、分析噪聲將為控制噪聲源、改進產品設計工藝、制定環保措施和相關法律提供重要依據。在辦公自動化、計算機等新技術日新月異發展的今天,人們同樣把對辦公自動化設備的噪聲處理倍加關注,在相應的環保標準中噪聲作為一項重要指標。在噪聲測量方面大都采用分布采點的方法來進行測量。但是測量點選擇只是通過簡單的投影量距的方法,每次測量都需人工去測量調整聲級計測量頭與被測物之間距離,因此工作量大而且耗時耗工。
本文介紹一種噪聲自動定位系統可以減小工作量并且精度高,他是由80C552[1]單片機為核心與DME2000[2]光電距離檢測器構成的自動定位裝置來進行噪聲測量,通過LCD顯示工作狀態具有很高的性能價格比,極具推廣價值。
2 基本原理
(1) 噪聲物理度量參數
噪聲與聲音是相同的,只不過噪聲是頻率更為復雜的聲音而已,通過常用的聲壓級、聲強級和聲功率級來表示噪聲的強弱,用頻譜或頻率來表示噪聲的高低。在實際測量中一般用聲功率表示噪聲特征:
Lp= 10lgP/P0
其中:Lp為聲功率級(dB);
p為聲功率;
p。為參考基準聲功率(10-12W)。
但在實際測量中聲功率不是直接測得的,只能在特定的測試條件下由測得的聲壓級經計算得到,在辦公自動化產品測量中一般采用自由場條件工程法。其中在反射面上自由聲場條件下,聲壓級與聲功率級的關系為:
Lp=Lp+10lgS/S0-K2
其中:Lp為測試表面的平均聲壓級(dB);
S為測試表面積(m2);
s。為基準表面積(1 m2);
K2為環境引起的修正值。
(2)測試方法
在噪聲的測試中,以靜電復印機噪聲測試為例,測量點選擇用一個剛好能包羅聲源的最小矩形六面體表面(或球面體、半球面體)作為基準測量表面,具體測量原則:只要測量點中最大、最小聲壓級之差不超過測量點數。
(3)自動定位裝置
自動定位系統的基本原理如圖1所示,利用距離傳感器測量被測物(復印機)的距離,由單片機控制步進電機調整聲級計與被測物的距離。其中距離傳感器采用DME2000光電距離檢測器,DME2000發射紅色一2級光(對人眼安全),距離值可通過模擬量或RS232進行傳輸,利用其直接反射模式可以以非接觸方式測量并且不受物體反射情形的影響,幾乎任何物體表面如堅硬、液面、粉狀等物體均可測量,檢測分析度為0.125mm,精度為±5mm。測量誤差隨被測物反射的減少而增加,但這一情況可由可選積分系數的積分器加以補償。
|
利用步進電機可以進行可逆距離的調整,由步進電機原理可知,步進電機各相繞組通電順序不同,轉動方向就不同。步進電機控制程序的主要任務是:判斷旋轉方向,按順序送出控制脈沖,以及判斷所要送出脈沖信號是否已經送完。設步進電機所要走的總步長放在寄存器R4中,轉向標志存放在程序狀態寄存器中標志位F0(即PSW.5H)中,當F0為0時,表示步進電機正轉;當F0為1時,表示步進電機反轉。在2DH單元內存放結束標志00H字。各點的距離情況可由鍵盤選擇由LCD顯示。步進電機控制程序清單如下:
CONTROLl: PUSH A
MOV R4,#N
CLR C
ORL C,PSW.5
JC ROTE
MOV R0,#20H
AJMP LOOP
ROTE: MOV R0,#H27
LOOP: MOV A,@R0
MOV P1,A
ACALL DELAY
INC R0
MOV A,#00H
ORL A,@R0
JZ TPL
LOOP1: DJNZ R4,LOOP
POP A
RET
TPL: MOV A,R0
CLR C
SUBB A,#61
MOV R0,A
AJMP LOOP1
DELAY: MOV R2,#M
DELAY1: MOV A,#M1
LOOP2: DEC A
JNZ LOOP2
DJNZ R2,DELAY1
RET
單片機控制的自動定位裝置工作流程圖如圖2所步進電機控制流程圖如圖3所示。
|
|

3 結 語
本文介紹了利用80C552單片機與DME2000構成的噪聲測量自動定位裝置,他可省去每次人工量距的麻煩并且精度高,利用LCD顯示自動定位情況更加方便,他不但可以作為辦公自動化噪聲測量裝置也可應用于大型機械監測。

評論