基于單片機的智能循跡小車的硬件設計

O 引言
智能車輛作為智能交通系統(tǒng)的關鍵技術之一,是許多高新技術綜合集成的載體。它體現(xiàn)了車輛工程、人工智能、自動控制及計算機技術于一體的綜合技術,是未來汽車發(fā)展的趨勢。本自動循跡小車系統(tǒng)采用數(shù)字攝像頭0V6620來采集路面信息,核心控制器MC9S12XSl28則可分析和處理圖像數(shù)據(jù),識別道路中央黑色引導線。另外,控制器還可根據(jù)道路前方黑色引導線距車體中心線之間的偏差送出控制信號給轉(zhuǎn)向舵機和電機驅(qū)動模塊MC33886,進而控制小車,以實現(xiàn)快速穩(wěn)定的循跡行駛。
1 系統(tǒng)硬件總體架構
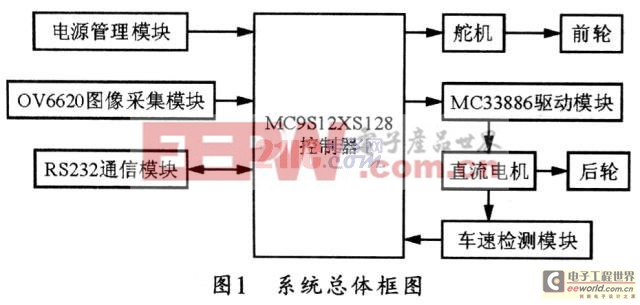
整個系統(tǒng)可以構成一速度閉環(huán)控制系統(tǒng),其總體框圖如圖1所示。
圖中,RS232模塊用于向PC機上傳圖像采集數(shù)據(jù),車速檢測采用歐姆龍公司的E6A2CS3C旋轉(zhuǎn)編碼器來檢測后輪驅(qū)動電機速度。
2 核心控制板設計
本系統(tǒng)的核心控制板實質(zhì)上是MC9S12XSl28的最小硬件系統(tǒng)。它由時鐘晶振電路、BDM接口電路、復位電路、MC9S12XSl28芯片、濾波電感、電容及接插件等構成。
另外,可用BDM(背景調(diào)試模塊)來向目標板下載程序。以將MC9S12XSl28內(nèi)部128KBFLASH中的程序擦除,這是BDM的編程功能。通過單片機只需用一個6針插頭將信息引出并和BDM調(diào)試器連接。其中BKGD是背景調(diào)試引腳。它可采用自定義協(xié)議并通過BDM調(diào)試工具進行單線雙向通信,從而進行實時在線調(diào)試。












評論