一種機器人的尋跡算法

1 引言
近年來,機器人的發展遍及機械、電子、冶金、交通、宇航、國防等領域,機器人的智能水平不斷提高。在自主式智能導航系統中,機器人要實現自動導引功能就必須要感知導引線,即常說的“尋跡”,這相當于給機器人一個視覺功能。
筆者所設計的機器人是一個自動導引小車(AGV),包括兩大部分:一是行進方向的檢測處理;二是步進電機的驅動。
在該系統里,采用與地面顏色有較大差別的線條作引導,使用傳感器感知導引線,用單片機AT89C52掃描光電傳感器組,對采集到的信號進行分析處理并做出邏輯判斷后,得到行進方向,然后根據一定的步數去驅動步進電機,實現機器人的循跡行進。
小車的驅動采用步進電機,因為步進電機具有快速起停能力,且轉換精度高,正反轉控制靈活。
2 硬件電路
采用AT89C52單片機作為控制核心對光電傳感器送來的各種信號進行分析處理,以控制機器人的方向和驅動及數據顯示等,如圖1所示。
為了檢測黑色導引線,筆者采用了8個光電傳感器組成的矩陣組。如圖2所示,相對于小車底盤的中心,我們布置了內外兩層各4個傳感器。每層4個傳感器對應著中心的4個方向:前、后、左前、右前。可采用掃描方式分兩次得到各行數據。

圖1 硬件框圖
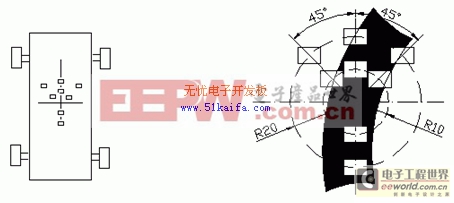
圖2 光電傳感器矩陣組
導引線檢測的具體電路如圖3所示。此處采用的是TCRT1000反射式紅外光電傳感器。以第1行第1列的光電傳感器為例,其工作原理是這樣的:P1 .0輸出低電平時,三極管A1015導通,光電傳感器工作,TCRT1000的發射端發出不可見的紅外光。當反射物由非黑色導引線變為黑色導引線時,光電三極管的基極接受不到反射光,從而光敏三極管由導通變為截止,使得集電極電壓由低電平變為高電平,經過74LS14反相器反相整形,輸出值由邏輯1變為邏輯0后,送入單片機中進行進一步處理。
值得指出的是在此處PNP三極管A1015的使用。此處如果選用NPN三極管,則在開機或復位時P1口各位輸出高電平會誤掃描傳感器矩陣,而選用PNP三極管就可以避免這種情況,能很好的控制光電傳感器的工作,并可以增加驅動能力。

圖3 光電傳感器尋跡電路圖
3 尋跡
單片機控制尋跡的原理是這樣的:第一步,通過矩陣式掃描,即給光電傳感器矩陣分別輸入兩個“1”信號的行值,將輸出的4個列值信號分別存入兩個地址(如30H、31H)的低4位,低4位從高到低分別對應著4個方向:前、后、左前、右前。然后用“F0”與這八位做“或”邏輯運算,即屏蔽掉高四位后作為本次的信號值;第二步,將本次的信號值與上一次掃描處理后的信號值進行邏輯處理,得出一個新方向,作為機器人行進的方向。
在這個程序里,邏輯處理內外層得到新方向是尋跡的關鍵。筆者在其中按先后步驟使用了3種規則:
(1) 前后比較規則
此規則是這個算法的核心規則。它的目的是盡可能的用新探測到的黑點作為新方向。新方向F通過
 (1)
(1)
來求得。(其中 為本次的信號值, 為前次的信號值)邏輯處理前“0”表示黑線軌跡,邏輯處理后“1”表示軌跡行進方向。舉例如下:以內層為例,設當前測得的值為
且前一次測得的值為
經過上述(1)邏輯處理后,假設結果為

則正前方是行進的新方向。
(2) 內外層切換規則
如果光電傳感器組前后兩次所檢測的值完全一樣,則在邏輯處理后會出現全零,這時保持原方向行進。如果碰到曲線拐彎或者曲線斷續,則有可能出現多個 “1”即多個方向,這時可采用“內外層切換規則”,也就是說從內層切換到外層,啟用外層掃描值重復上述前后比較規則來進行判斷。啟用外層信號進行二次判斷能很好的處理曲線拐彎及曲線斷續等內層處理不好的情況。但用外層信號判斷,因為其傳感器布置的間隙距離比內層大,其控制精度不如用內層信號判斷高。
(3) 糾錯規則
在運行中,傳感器有可能受到干擾而發出錯誤信號導致機器人走錯或迷失方向,這個時候糾錯規則能讓機器人后退起到糾錯作用。所謂糾錯規則就是在走錯后出現了內外層左前、前、右前均沒有探測到引導線,而后向探測到了導引線的情況下,讓機器人后退,一直退到前面三個方向傳感器里有傳感器探測到導引線為止。此時再用(1)式求得新的行進方向,從而實現糾錯功能。
其中前后比較法的邏輯處理及隨后的判斷程序具體如下:(30H放本次信號值,32H放前次信號值)
DATADEAL:MOV A, 30H
XRL A, 32H
ANL A, 32H ;按(1)式求新向
MOV 36H, A ;保存
MOV R3, #8
MOV R4, #0
COUNT: JB ACC.0, ADDN
COUNT1: RR A
DJNZ R3, COUNT
CJNE R4, #1H, JUDGE ;R4里所含不是1個“1”時,
;轉“JUDGE”再判斷
AJMP MOTORRUN ;R4里只有一個“1”時,以此
;“1”所代表的方向作為新方向
ADDN: INC R4
AJMP COUNT1
JUDGE: JC KEEPMOVE ;少于一個“1”,保持原方向
AJMP OUTCHECK ;多于一個“1”,則取用外層
……
MOTORRUN:…… ;電機驅動子程序
KEEPMOVE:…… ;保持原運動狀態子程序
OUTCHECK:…… ;取用外層信號值判斷子程序
4 執行
導引機器人的驅動方式采用一驅動輪一轉向輪方式:將后輪作為驅動輪,前輪作為轉向輪,通過切換轉向輪向左或向右的方式改變機器人的方向。這種方式與汽車的控制方式一樣,直線行進性能好,可以高速移動。從1個步進脈沖對應的行進路程,可以預算出應給步進電機發出的脈沖數。預定的行進路程以小于內層傳感器間隙距離的1/2為宜,這樣可以保證機器人位置測量的連續性和方向識別的準確性。單片機AT89C52根據其邏輯處理出來的方向,調用步進電機的驅動程序即可實現機器人循跡連續運動的功能。
5 結束語
筆者在做好硬件部分的基礎上,根據上述思路編制了程序進行了實驗。實驗中筆者采用了與底色有較大差異的黑色膠帶作導引線,膠帶寬1.8cm,其中導引線總長6000mm,斷續部分的間斷距離不大于10mm,步進電機執行一次驅動預定的行進路程為4mm。在沒有強烈日光干擾的情況下,筆者所設計的尋跡系統能自動識別黑色導引線并選擇正確的方向運動。測試結果:系統總能在60S內連續正確地走完全程,而且機器人(中心)所走的軌跡基本上在黑線上。可見,即使是比較復雜的曲線,筆者設計的導引機器人也能準確地實現尋跡功能。
本文作者的創新點是:針對基于光電傳感器組尋跡的自動導引機器人,設計了一種新的傳感器陣列的布置方式。根據此布置方式,提出了三個處理規則結合而成的軌跡識別算法。
參考文獻
1. 何立民.MCS—51系列單片機應用系統設計.北京:北京航空航天大學出版社,2003年
2. 廖華麗,周祥,董豐,王延旗.基于模糊控制的AGV尋跡算法.哈爾濱工業大學學報 2005(7)
3. 胡銀彪,馮建超.拖靶高度控制系統的設計.微計算機信息 2002(11)










評論