在PSoC4平臺上開發(fā)步進電機控制系統(tǒng)

4. 基于PSoC4的步進電機控制架構(gòu)及優(yōu)勢
PSoC4片內(nèi)集成有兩個電流數(shù)模轉(zhuǎn)換器 (IDAC),分別為最大7位和8位精度。均取為7為精度,因此可以產(chǎn)生最大為128細分的階梯狀正弦波。圖5表示由IDAC產(chǎn)生的兩路16細分基準正弦波。
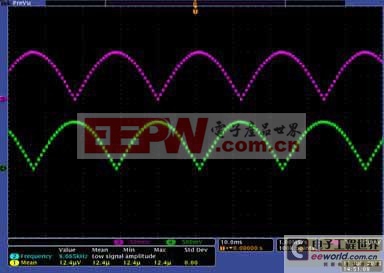
圖5:16細分基準正弦波
圖6為基于PSoC4的步進電機控制架構(gòu)框圖。
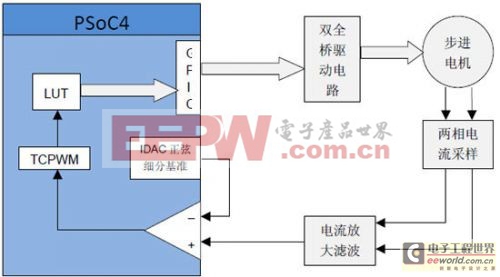
圖6:步進電機控制框圖
對電機的兩相電流分別進行采樣,經(jīng)放大和高頻濾波后與IDAC產(chǎn)生的電流基準由PSoC4的內(nèi)部比較器 進行比較,當實際相電流超過基準值時,將由PSoC4關(guān)閉驅(qū)動電機的PWM輸出一個周期,這樣就可以迫使電機的實際相電流跟蹤IDAC產(chǎn)生的電流基準,實現(xiàn)正弦波細分驅(qū)動。
對比PSoC4控制架構(gòu)于前述的商用方案可以發(fā)現(xiàn),由于PSoC4內(nèi)部集成了IDAC、可編程的CPLD(UDB)和比較器,因此具備CPLD方案的所有性能與優(yōu)勢,同時其內(nèi)部的高性能Cortex-M0核又使其可以完成MCU的控制功能,并具有其低成本的特點。因此,基于PSoC4的步進電機控制方案在性價比上有很大的提高。
5. 基于PSoC4 的步進電機控制設(shè)計實例
①控制原理圖設(shè)計
圖7為PSoC Creator環(huán)境下的步進電機控制原理圖,虛線框內(nèi)的部分即為依據(jù)圖4構(gòu)建的電機相電流細分驅(qū)動電路。兩路電流獨立控制,相位相差90。。內(nèi)部低功耗比較器的同向端接電機向電流經(jīng)采樣、放大和濾波后的電壓信號;反向端節(jié)內(nèi)部IDAC輸出的細分正弦信號。比較器輸出高電平將關(guān)閉TCPWM一個周期,迫使電機相電流跟蹤IDAC的電流基準波形,實現(xiàn)步進電機的細分驅(qū)動控制。
圖中的定時器用于設(shè)計細分步長,通過在軟件中修改其周期值可以實時改變電機的轉(zhuǎn)速。圖中的ADC可以讀入模擬的速度輸入信號,作為電機的給定轉(zhuǎn)速。
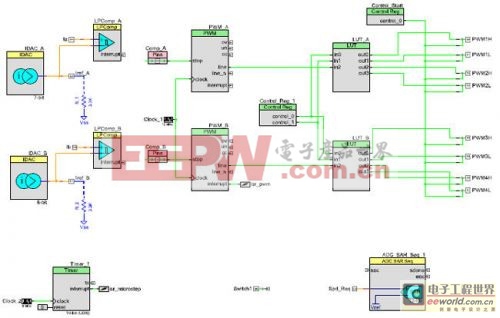
圖7:步進電機控制原理圖
②控制系統(tǒng)軟件設(shè)計
1)主程序設(shè)計
控制主程序首先初始化和配置PSoC4的內(nèi)部資源,在主循環(huán)中檢測用戶的起停命令和速度給定,決定運行或鎖定步進電機。圖8為控制主程序的流程圖。
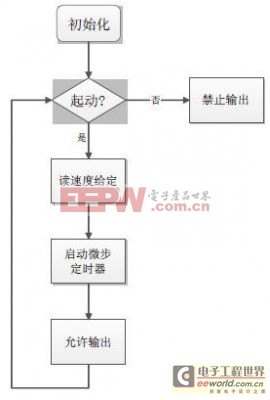
圖8:主程序流程圖






評論