嵌入式組合控制直線一級倒立擺系統

本文針對本科自動控制原理課程設計中倒立擺擺桿偏角控制器的在線仿真存在:手扶擺桿起擺不安全,單變量擺桿角度控制器無法同時控制小車的位置,實驗觀測不便等問題,提出并設計了基于固高公司起擺控制、最優小車位置控制、嵌入學生擺桿偏角控制的組合式控制系統。在線仿真實驗表明,組合式控制系統對直線一級倒立擺的控制有效,能滿足本科自動控制原理課程沒計及實驗的安全、自動、直觀、迅捷、可靠的要求。
1 系統建模
小車直線一級倒立擺系統的控制目標是擺桿偏角最大不超過±5°,小車在軌道中間位置左右偏移不超過±10 cm,以達到一種動態的平衡。
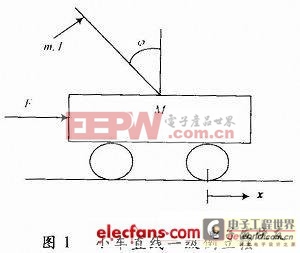
小車直線一級倒立擺實驗系統如圖1所示。對小車和擺桿做受力分析,根據牛頓運動定律,可得小車直線一級倒立擺動力學模型如式(1)所示。
式中:M為小車質量,m為擺桿質量;b為小車摩擦系數;l為擺桿長;I為擺桿轉動慣量;θ為擺桿偏角;x為小車位移;F為小車受力。
由于θ=π+φ,且φ≤1(換算成弧度比較),u代表被控對象的輸入力F,則對式(1)進行線性化處理,可得式(2),如下:
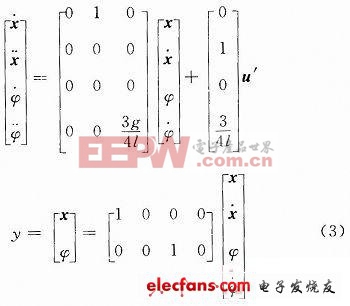
對質量均勻擺桿,取![]() ,由線性系統理論得系統的狀態空間如式(3)所示:
,由線性系統理論得系統的狀態空間如式(3)所示:
2.1 系統能控性分析
被控系統狀態完全可控性矩陣Uc=[B AB A2BA3B],通過計算可得rank(Uc)=4,即矩陣Uc的秩等于系統狀態變量維數;被控系統輸出完全可控性矩陣Uo=[CB CAB CA2B CA3B D],求得rank(Uo),即矩陣Uo的秩等于系統輸出向量維數。所以系統可控,可以對系統進行控制器設計,使系統穩定。
本文所使用的控制器是由自動起擺控制器Swingup Controller、線性二次調節器LQR Controller和學生設計的控制器Controller1組成的嵌入式組合控制器。在Simulink中搭建直線一級倒立擺嵌入式組合控制系統,如圖2所示。
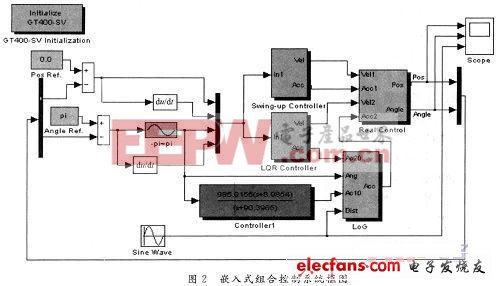
自動起擺控制器Swing-up Controller能夠控制直線一級倒立擺由靜止下垂的穩定平衡狀態自動轉化到豎直向上的不穩定平衡狀態,而無需給擺桿施加力的作用,就可以實現擺桿的自動擺起。
2.2 LQR控制器原理針對線性系統的狀態方程

伺服電機相關文章:伺服電機工作原理







評論