超聲波傳感器 - 應用原理和選型時需要關注的參數

人耳一般能夠聽到的聲音頻率范圍是20Hz ~20KHz,超聲波是一種頻率高于人類聽覺范圍的機械波,其頻率超過20KHz。與可聽聲波類似,超聲波在各種介質中(非真空環境)通過機械振動傳播。空氣中超聲波的傳播速度約是343m/s(20°C 時),在水中的傳播速度約為1500m/s。
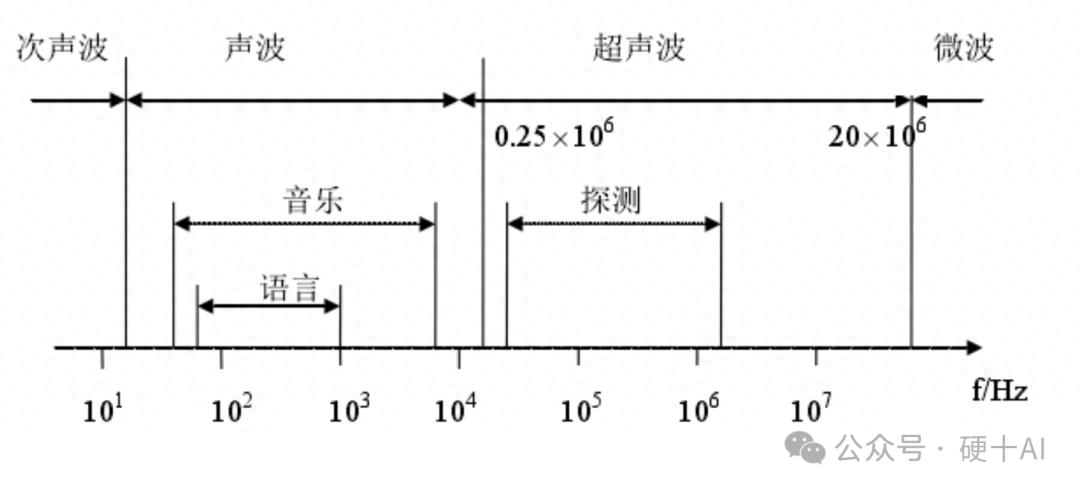
超聲波因均有頻率高、波長短、穿透性強的特性,被用于需要高精度、非破壞性的探測和成像等場合,應用的領域包括。
測距和定位: 如超聲波傳感器,用于測量距離和檢測障礙物。
醫療成像: 超聲波用于醫學超聲成像,如超聲波檢查、胎兒監測等醫學成像應用,通過利用不同組織反射回的超聲波來生成圖像。
無損檢測: 超聲波可用于檢測金屬、混凝土等材料的內部缺陷或裂縫。
動物導航 : 蝙蝠和海豚等動物, 通過發送和 接收 超聲波來導航和獵食。
2、機器人上應用的超聲波傳感器是什么?
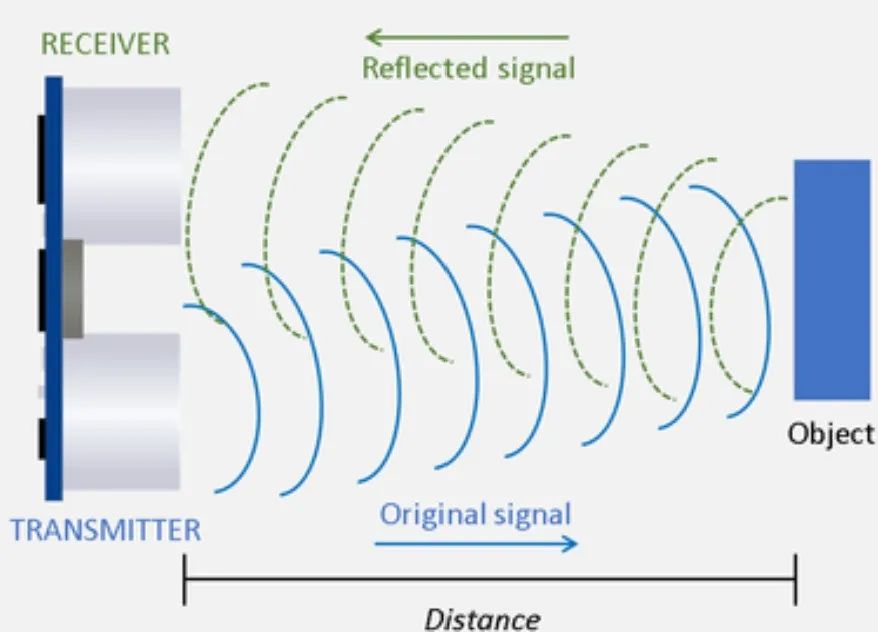
機器人上應用的超聲波傳感器是一種使用超聲波來測量距離或檢測物體的設備。它通過發射超聲波脈沖,然后接收由目標物體反射回來的回波信號來工作。根據聲波從發射到接收到反射波所需的時間,超聲波傳感器能夠計算出物體與傳感器之間的距離。
(1)超聲波傳感器的主要組成部分包括

發射器: 產生超聲波,通常是一個壓電晶體或電磁換能器,它能將電能轉換成聲能。
接收器: 檢測從物體反射回來的超聲波, 它將聲能轉換回電能。
測量計算裝置: 利用 傳感器系統記錄超聲波發射出去到接收回來的時間差,并通過時間差來推算距離。
(2)超聲波傳感器的工作流程
發射超聲波:傳感器中的發射器發出一定頻率的超聲波(通常是40kHz左右)。
波在空氣中傳播:超聲波在空氣中以音速傳播(約343m/s,20°C時)。
距離的計算公式
以在空氣介質中傳播為例,v是343m/s,t是發射到接收的時間,這個時間包含了往返時間,除以2才能得到單程距離。
3、超聲波傳感器的用途和優缺點是什么?
超聲波傳感器在距離測量、流體位測量、物體檢測、汽車倒車輔助系統、機器人導航等領域有著廣泛的應用。超聲波傳感器這種非接觸式測距的方案性價比高,主要的優點包括
不受顏色和透明度影響:不像紅外/視覺傳感器,超聲波不受目標顏色、亮度、透明度影響。玻璃、黑色表面也能有效反射超聲波。
抗環境光干擾能力強:對光照不敏感,室內室外強光或黑暗環境均可穩定工作。
安全、無輻射:超聲波對人體無害,沒有電磁干擾問題。
安裝靈活:模塊小巧,可方便地布置在機器人各個方向。
超聲波傳感器的缺點是 對軟質材料(如織物)或不規則表面的檢測效果不佳,精度有限, 有效測量范圍有限。
4、超聲波硬件選型時需要關注的范疇?
(1)如何選擇合適的超聲波傳感器
測量距離: 不同的超聲波傳感器具有不同的測量距離范圍,從幾厘米到幾十米甚至更遠。如果是短距離測量,例如機器人在狹窄空間內的避障,選擇測量范圍較小的傳感器即可;如果是用于長距離檢測,如大型設備的遠程監控,就需要選擇測量范圍較大的型號。
測量精度: 如果是對精度要求不高的場景,如簡單的障礙物檢測,精度稍低的傳感器可能就可以滿足需求; 但如果是用于精密加工或高精度定位的機器人,就需要選擇精度高的超聲波傳感器。
工作環境: 滿足工作環境的問題、濕度要求。 如果工作環境中存在其他超聲波設備、氣動閥、噴氣嘴等可能產生超聲波噪聲的設備,需要選擇抗干擾能力強或能夠避免干擾的傳感器,或者采取相應的屏蔽措施。
尺寸和安裝方式: 對于 空間有限的機器人應用場景,需要選擇小巧緊湊的傳感器; 有些場景可能需要特殊的安裝方式,如嵌入式安裝、法蘭安裝等,要確保傳感器能夠方便地安裝和固定。
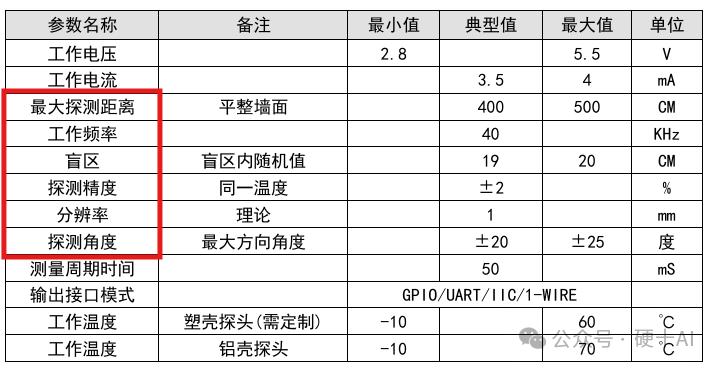
(2)超聲波選型時需要關注的硬件參數 超聲波傳感器在選型和應用時,需要關注一系列關鍵硬件參數,這些參數直接影響其測量精度、使用場景、可靠性和兼容性。
測距范圍(Min/Max Range):最小和最大可測距離(如2cm~400cm)
測距盲區(Blind Zone):傳感器無法測距的最小距離區間(通常為2cm左右)。
測距精度(Accuracy):實際測距與真實距離的最大誤差(如±2%)
分辨率(Resolution):能夠分辨的最小距離變化(如0.1cm)
發射角度/波束角(Beam Angle):超聲波錐形發射的角度范圍,常見為15°~30°
頻率(工作頻率):發射器的超聲波頻率,常見為 40kHz
說明:參考以下超聲波的芯片手冊
5、超聲波選型為什么要關注“探測角度”這個參數?
“探測角度”也叫“波束角”,在工程應用中這是超聲波傳感器選型的一個很關鍵參數。
(1) 探測角度的原理:由超聲波的發射特性決定
超聲波傳感器內部的換能器(Transducer)在發射聲波時,不會像激光那樣形成一條直線束,而是以一定角度向前錐形擴散,這就是所謂的探測角度或波束角,它的形成和頻率、換能器直徑、探頭結構設計都相關。
超聲波傳感器發出的聲波信號會向左右各擴展一個角度,形成一個錐形區域,在這個角度范圍內遇到物體,就有可能反射回波并被接收。
(2)探測角度對應用的影響:探測角度大,可以增大探測范圍,但容易受旁邊物體干擾,定位不精確,并且多個模塊工作時可能“聽到”彼此的回聲,造成串擾。工程應用選型時
通用超聲波傳感器:波束角約15°~30°,用于前方寬區域檢測。
工業窄波束傳感器:波束角 10°以內,適合高精度避障或液位測量。
你可以想象站在一個黑暗的房間里打手電筒
聚光燈=小波束角,照得遠但視野窄(高精度、定向探測)
泛光燈=大波束角,視野廣但照得近(范圍廣、適合泛探測)
綜上,“探測角度”這個參數的原因是超聲波天然具有擴散性,無法像激光一樣嚴格定向,波束角越小,測距更穩定;越大則適合大范圍檢測,但要關注機器人超聲波周圍的結構件對超聲波的影響。











評論