機器人、無人機是怎么知道自己的姿態的?揭秘 IMU 的關鍵參數

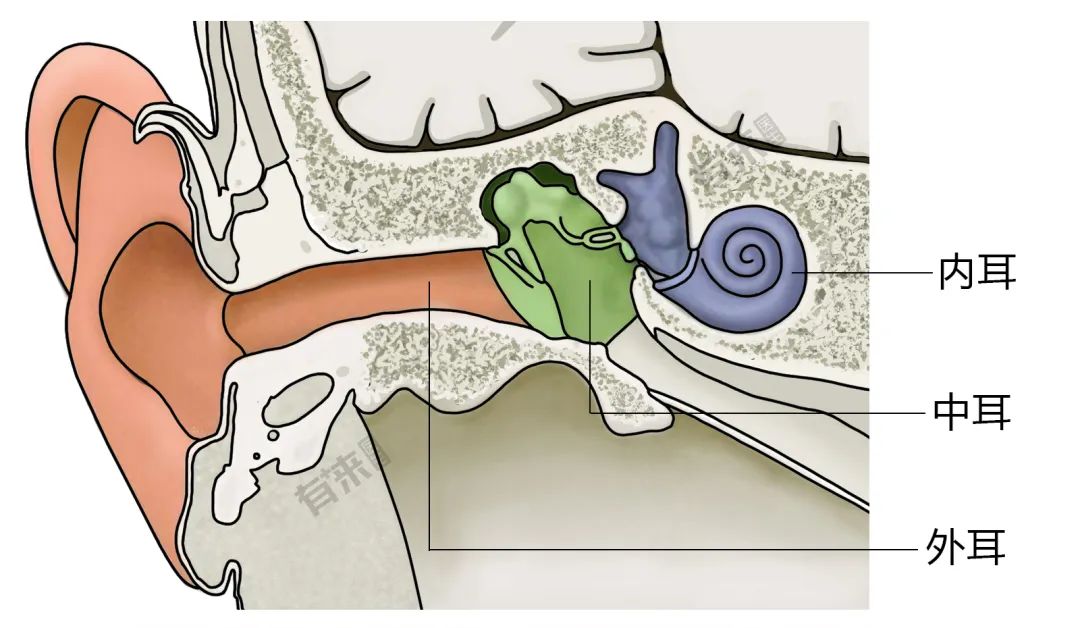
正常情況下,前庭系統(內耳)、視覺系統(眼睛)和軀體感覺系統(皮膚、肌肉)會向大腦傳遞一致的運動信息。例如:
坐車時,眼睛看到窗外景物后退,內耳感知到車輛的直線 / 旋轉運動,身體也感受到座椅的支撐力變化,三者信號統一,大腦能準確判斷 “正在運動”,身體適應良好。
但暈車時,這種信號一致性被打破了:
比如坐在封閉車廂內看手機,視覺系統會告訴大腦 “身體靜止”(因為手機或車內景物相對靜止);
但內耳的前庭系統卻能感知到車輛的顛簸、轉彎、加速等運動,向大腦傳遞 “正在運動” 的信號; 兩種矛盾的信號被送入大腦,大腦無法統一判斷身體狀態,就會觸發 “異常警報”—— 這種沖突被解讀為 “可能中毒”(進化中,感官混亂常與毒素致幻相關),進而引發惡心、嘔吐、頭暈等暈車癥狀。
兒童和女性更容易暈車,部分原因是他們的前庭系統更敏感,對信號沖突更難耐受;此外,睡眠不足、疲勞、氣味刺激等也會加重這種不適。
如果我們把攝像頭、深度相機、雷達比作機器人、無人機的眼睛的話,那么IMU這個“器官”比喻成“內耳”再貼切不過了。
a)陀螺儀
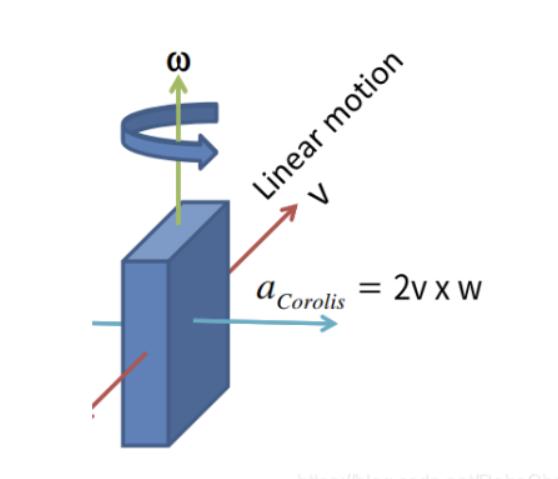
陀螺儀是通過測量科氏力來檢測角速度的,科氏力在大學物理中提到過,如圖
若圓盤逆時針旋轉,你在盤心向邊緣沿半徑勻速直線 扔出一個球。 靜止觀察者
看到:球沿直線飛出(藍色路徑)。 圓盤上的觀察者
看到:球的軌跡向右彎曲(紅色路徑)→ 仿佛有“無形之力”拉動它。
→ 這個虛擬力就是科氏力!
科氏力公式:

( m ):物體質量 ( ω ):旋轉坐標系的角速度矢量 ( v):物體在旋轉系中的速度矢量 “×” 表示矢量叉乘 → 力方向垂直于運動平面!
在實際的MEME傳感器中,大致結構如圖,在一個方向保持左右運動,若有旋轉的角速度則會在垂直的方向產生科氏力,通過電容的變化來反映這個力的大小便能得到旋轉速度的大小。
a)加速度計
加速度計的原理較為簡單,就是通過牛頓第二定律來測量三軸的加速度,圖中的質量塊受到加速度的作用會左右運動,而兩側的電容能測量質量塊的位置從而計算出加速度的大小。
a)磁力計
磁力計則是通過霍爾效應來測量磁場的強度,高中物理中學過霍爾效應也很簡單,如圖。一端通電,在磁場的作用下電子會往垂直的方向上跑從而在側面產生電場,通過測量這個電場的強度及正負則能間接測量出場強的大小。
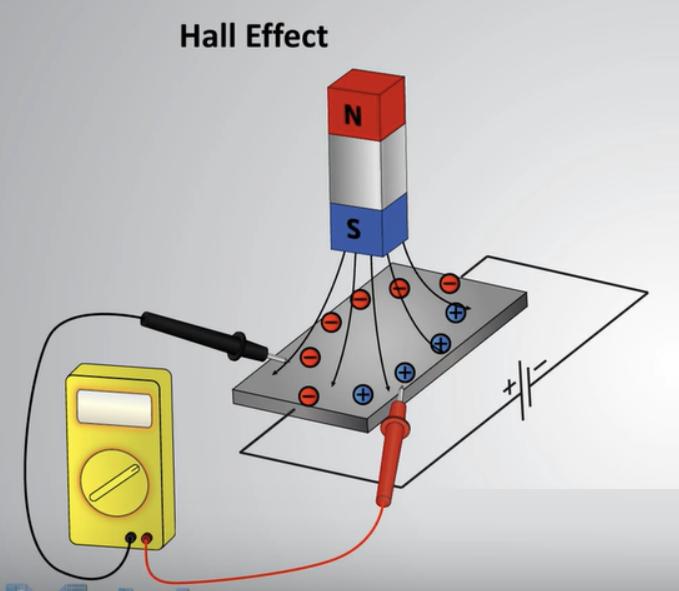
一般來說,無人機和機器人上的磁力計,是用來測量地磁的。用于機器人找得到“北”。
IMU:機器人的 “內耳”
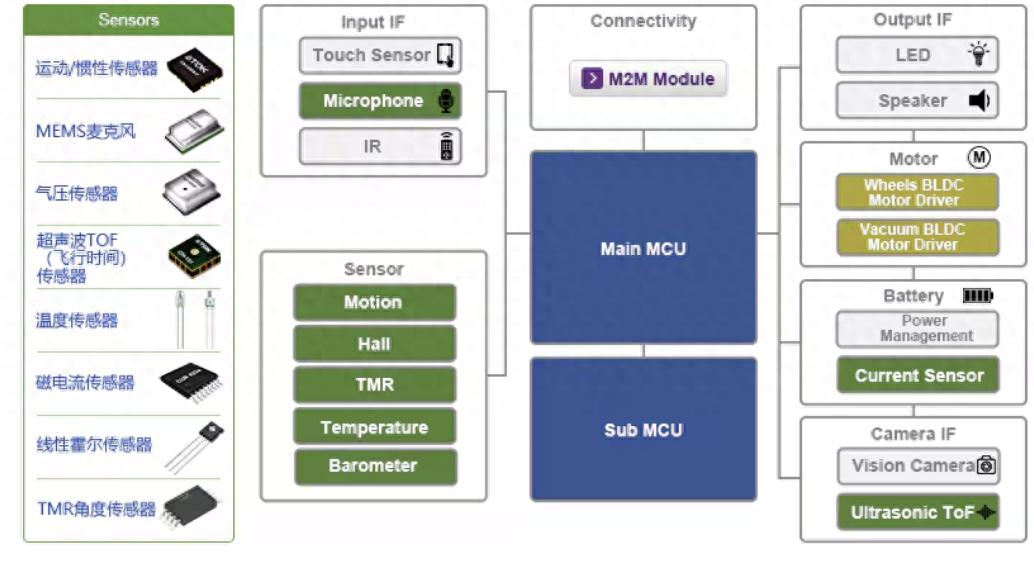
簡單來說,IMU 的核心功能是測量物體的角速度(陀螺儀)和線加速度(加速度計),再通過算法(如卡爾曼濾波、歐拉角解算)推算出姿態(如俯仰角、橫滾角、航向角)。無論是家庭掃地機器人避開障礙,還是工業機械臂保持軌跡精度,都離不開 IMU 的實時數據支持。
而一款 IMU 的 “好壞”,不能只看品牌,更要盯著參數表 —— 這些數字直接決定了它在噪聲控制、測量范圍、功耗等方面的表現。
關鍵參數解析:從性能到實用性
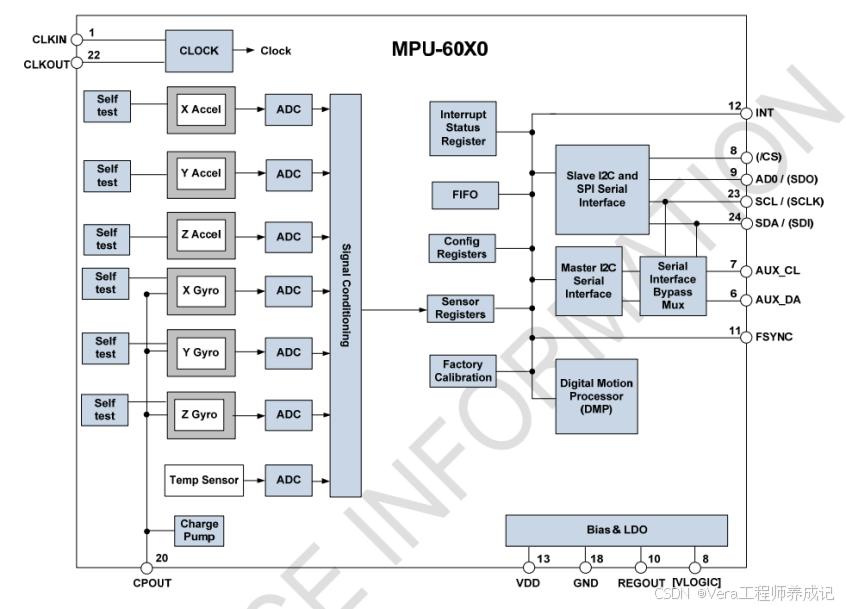
我們以 InvenSense(TDK)的 IMU 芯片為例,拆解 IMU 的核心參數及其對應用的影響。
一、基礎硬件特性
1. FIFO(First In First Out)
定義
:芯片內部的先進先出數據緩沖區,用于臨時存儲傳感器數據。 作用
:當主控處理器(如 MCU)處理數據速度較慢時,FIFO 可緩存多組傳感器數據,避免數據丟失。例如,芯片以 1000Hz 采樣,但 MCU 只能以 200Hz 讀取數據,FIFO 可暫存 5 組數據。 典型值
:ICM-42688-P 的 FIFO 為 2KB,ICM-42670-P 為 2.25KB。
2. ADC(Analog-to-Digital Converter)
定義:模數轉換器,將傳感器的模擬信號轉換為數字信號。在IMU芯片內部,還是需要用ADC對上述電容對應的電壓值進行采樣的。
關鍵指標:位數(如 16bit)決定分辨率,16bit 可表示 65536 個離散值,量化誤差更小,精度更高。
3. 可編程數字濾波
定義:芯片內置數字濾波器(如低通、高通),用戶可通過編程設置濾波參數。
作用:濾除特定頻率的噪聲。例如,設置低通濾波截止頻率為 50Hz,可抑制高于 50Hz 的高頻噪聲(如電機干擾)。
4. 溫度傳感器
作用:實時測量芯片內部溫度,用于溫度補償(如校準陀螺儀零偏隨溫度的漂移)。
精度要求:通常需 ±1°C 以內,以保證補償效果。
5. 可編程中斷
定義:芯片可根據預設條件(如加速度超過閾值、FIFO 滿)主動向主控發送中斷信號。
應用場景:低功耗場景中,僅在需要時喚醒主控,降低系統功耗。例如,運動喚醒檢測(WoM)觸發中斷后,主控才開始處理數據。
6. IIC 接口 / SPI 接口
定義:兩種數字通信協議,用于芯片與主控間的數據傳輸。
IIC:雙線制(SDA、SCL),適合短距離、低速通信(標準模式 100kbps,快速模式 400kbps)。
SPI:四線制(MOSI、MISO、SCK、CS),速度更快(可達數十 Mbps),適合大數據量、高速傳輸。
二、功耗與可靠性特性
7. 低噪聲模式 / 低功耗模式
低噪聲模式
:通過增加采樣次數或優化電路設計降低噪聲,但功耗較高。例如,ICM-42688-P 六軸同時工作時典型電流 0.88mA。 低功耗模式
:降低采樣率或關閉部分電路以降低功耗。例如,ICM-42670-P 六軸同時工作時典型電流 0.55mA,睡眠模式僅 3.5μA。
8. 20000g 抗沖擊能力
定義
:芯片能承受 20000 倍重力加速度的沖擊而不損壞。 意義
:適應惡劣環境(如工業振動、無人機碰撞),確保物理可靠性。
9. Self-test 自測試
功能
:芯片內置測試電路,可自檢陀螺儀、加速度計是否正常工作。 應用
:設備啟動時執行自測試,快速排查傳感器故障(如零偏異常)。
10. WoM(Wake-on-Motion)運動喚醒檢測
原理
:芯片持續監測加速度,當檢測到運動(如振動、晃動)時,從低功耗模式喚醒主控。 典型應用
:智能手表在用戶抬手時喚醒屏幕,降低待機功耗。
三、陀螺儀關鍵參數(角速度測量)
11. 可編程滿量程范圍(FSR)
定義
:陀螺儀能測量的最大角速度范圍,通常用 °/s 表示。 可選范圍
:例如 ICM-42688-P 支持 ±15.625~±2000°/s(8 檔可調)。 選擇原則
:高速運動場景(如無人機)選大范圍(如 ±2000°/s),但靈敏度降低;靜態或低速場景(如傾角測量)選小范圍(如 ±15.625°/s),提高精度。
12. 靈敏度比例因子
定義
:單位角速度對應的數字輸出值(LSB/°/s)。 計算公式
:例如 FSR 為 ±2000°/s 時,靈敏度為 16.4 LSB/°/s,則 1°/s 的角速度對應 16.4 個數字量。 意義
:靈敏度越高,量化誤差越小,測量越精確。
13. 非線性度
定義
:實際輸出與理想直線的最大偏差百分比。 典型值
:±0.1%(如 ICM-42688-P 在 ±2g 量程下)。 影響
:非線性度越高,在大量程下誤差越大。
14. 交叉軸靈敏度
定義
:某軸輸入角速度時,其他軸的錯誤輸出比例。 典型值
:±1.25%(如 ICM-42688-P)。 影響
:交叉軸靈敏度越高,軸間干擾越大,姿態解算誤差越大。
15. 零速率輸出(ZRO)
定義
:靜止時陀螺儀的實際輸出與理論值(0°/s)的偏差。 參數
:包含初始公差(如 ±0.5°/s)和溫漂(如 ±0.005°/s/°C)。 影響
:ZRO 越大,靜態時的角速度測量誤差越大,長時間積分會導致姿態角累積誤差。
16. 速率噪聲譜密度
定義
:單位頻率下的噪聲強度,單位 mdps/√Hz(毫度每秒每根號赫茲)。 典型值
:例如 ICM-42688-P 在 10Hz 時為 2.8 mdps/√Hz。 意義
:噪聲譜密度越低,輸出越平滑,適合高精度應用。
17. 總均方根噪聲(RMS 噪聲)
定義
:特定帶寬內的噪聲有效值,單位 °/s-rms。 典型值
:例如 ICM-42688-P 在 100Hz 帶寬、800Hz 采樣率下為 0.07~0.14°/s-rms。 影響
:噪聲越大,角速度波動越明顯,需通過濾波算法平滑。
18. 機械頻率
定義
:陀螺儀內部機械結構的諧振頻率。 典型值
:25~29kHz(如 ICM-42688-P)。 設計原則
:工作頻率應遠離機械頻率,避免共振導致測量誤差。
19. 陀螺儀啟動時間
定義
:從通電到輸出穩定數據的時間。 典型值
:例如 ICM-42688-P 為 40ms,ICM-42670-P 為 30ms。 影響
:啟動時間越短,設備響應越快,適合需要快速啟動的場景(如無人機)。
20. 輸出數據速率(ODR)
定義
:傳感器數據的更新頻率,單位 Hz。 范圍
:例如 ICM-42688-P 的陀螺儀 ODR 為 12.5~32000Hz。 選擇原則
:高速運動場景(如四軸飛行器)需高 ODR(如 8000Hz)以捕捉快速變化;低功耗場景可選低 ODR(如 12.5Hz)。
四、加速度計關鍵參數(線加速度測量)
21. 可編程滿量程范圍(FSR)
定義
:加速度計能測量的最大加速度范圍,通常用 g 表示(1g≈9.8m/s2)。 可選范圍
:例如 ±2g/±4g/±8g/±16g(ICM-42688-P 支持 4 檔可調)。 選擇原則
:劇烈運動場景(如碰撞測試)選大范圍(如 ±16g);靜態傾角測量選小范圍(如 ±2g)以提高精度。
22. 靈敏度比例因子
定義
:單位加速度對應的數字輸出值(LSB/g)。 典型值
:例如 FSR 為 ±2g 時,靈敏度為 16384 LSB/g,則 1g 的加速度對應 16384 個數字量。
23. 非線性度 / 交叉軸靈敏度
含義
:與陀螺儀類似,分別表示輸出曲線的非線性偏差和軸間干擾比例。 典型值
:非線性度 ±0.1%,交叉軸靈敏度 ±1%。
24. 零重力輸出(ZGO)
定義
:靜止時加速度計的實際輸出與理論值(如水平放置時 x/y 軸應為 0g,z 軸應為 1g)的偏差。 參數
:包含初始公差(如 ±20mg,1mg=0.001g)和溫漂(如 ±0.15mg/°C)。 影響
:ZGO 越大,靜態傾角計算誤差越大。
25. 功率譜密度 / 均方根噪聲
定義
:與陀螺儀類似,分別表示單位頻率噪聲強度(如 10Hz 時 65μg/√Hz)和特定帶寬內的噪聲有效值(如 100Hz 帶寬下 0.65mg-rms)。 影響
:噪聲越低,靜態加速度測量越穩定,適合高精度傾角測量。
26. 加速度計啟動時間 / ODR
含義
:與陀螺儀類似,分別表示啟動穩定時間(如 10ms)和數據更新頻率(如 ICM-42688-P 的 ODR 為 1.5625~32000Hz)。
五、電氣與環境參數
27. VDD/VDDIO
定義
:芯片主電源(VDD)和 I/O 接口電源(VDDIO)的電壓范圍。 典型值
:最小 1.71V,典型 1.8V,最大 3.6V。 意義
:支持寬電壓范圍,便于與不同供電系統兼容。
28. 低噪聲模式功耗 / 全芯片睡眠模式
低噪聲模式功耗
:例如 ICM-42688-P 六軸同時工作時為 0.88mA,ICM-42670-P 為 0.55mA。 睡眠模式功耗
:例如 ICM-42688-P 為 7.5μA,ICM-42670-P 為 3.5μA。 應用
:電池供電設備需優先選擇低功耗型號。
29. 溫度范圍
定義
:芯片正常工作的溫度范圍。 典型值
:-40°C~+85°C。 意義
:適應工業、汽車等惡劣環境。
六、IMU選型指南
高精度應用
(如工業機器人):優先關注噪聲譜密度(越低越好)、零偏溫漂(越小越好)。 高速運動場景
(如無人機):選擇高 ODR(如 32000Hz)、大量程 FSR(如 ±2000°/s)。 低功耗場景
(如穿戴設備):選擇睡眠電流小(如 3.5μA)、低功耗模式電流低(如 0.55mA)的型號。 惡劣環境應用
(如車載設備):確保溫度范圍覆蓋 - 40°C~+85°C,抗沖擊能力≥20000g。
理解這些參數,就能根據具體需求挑選最合適的 IMU 芯片,讓機器人的 “內耳” 更靈敏、更可靠。







評論