嵌入式通信穩如老狗?試試這個環形FIFO緩沖區設計!

在嵌入式系統中,串口(UART)、SPI 等通信接口常常面臨高速數據傳輸的挑戰,尤其在中斷頻繁或處理器負載較高的情況下,容易出現數據丟失。為了解決這一問題,環形緩沖區(Ring Buffer)成為了一個高效且可靠的解決方案。
什么是環形緩沖區?
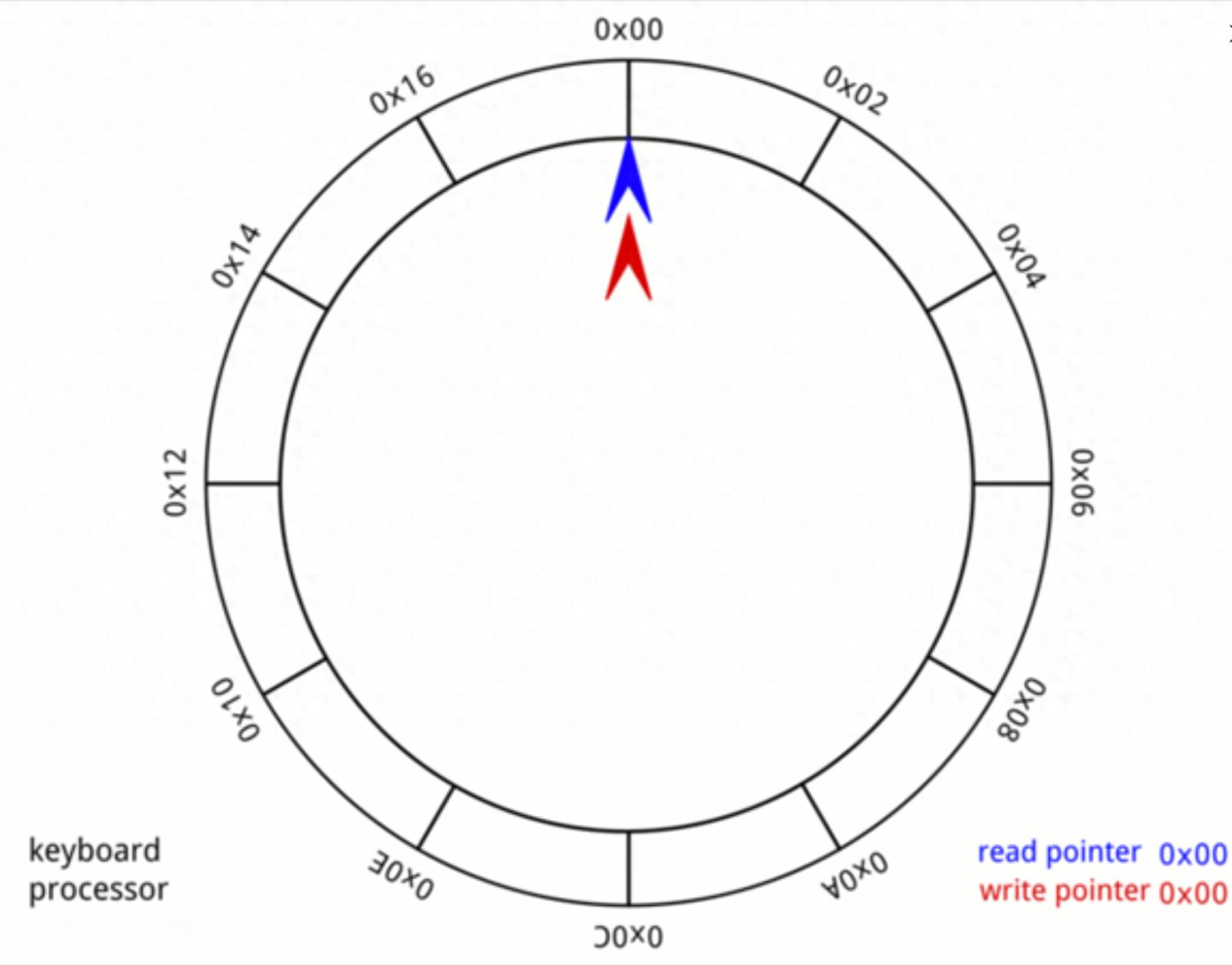
環形緩沖區,也稱為循環緩沖區,是一種固定大小的 FIFO(先進先出)數據結構。它使用兩個指針:一個用于寫入數據(寫指針),另一個用于讀取數據(讀指針)。當指針達到緩沖區末尾時,它們會回繞到緩沖區的起始位置,從而形成一個“環”。
這種結構特別適用于嵌入式系統中需要連續讀取和寫入數據的場景,如串口通信、傳感器數據采集等。
環形緩沖區的實現
以下是一個使用 C 語言實現的簡單環形緩沖區示例:
#define BUFFER_SIZE 128typedef struct {
uint8_t buffer[BUFFER_SIZE]; volatile uint16_t head; volatile uint16_t tail;
} RingBuffer;void RingBuffer_Init(RingBuffer *rb) {
rb->head = 0;
rb->tail = 0;
}bool RingBuffer_IsEmpty(RingBuffer *rb) { return rb->head == rb->tail;
}bool RingBuffer_IsFull(RingBuffer *rb) { return ((rb->head + 1) % BUFFER_SIZE) == rb->tail;
}bool RingBuffer_Put(RingBuffer *rb, uint8_t data) { if (RingBuffer_IsFull(rb)) { return false; // 緩沖區已滿
}
rb->buffer[rb->head] = data;
rb->head = (rb->head + 1) % BUFFER_SIZE; return true;
}bool RingBuffer_Get(RingBuffer *rb, uint8_t *data) { if (RingBuffer_IsEmpty(rb)) { return false; // 緩沖區為空
}
*data = rb->buffer[rb->tail];
rb->tail = (rb->tail + 1) % BUFFER_SIZE; return true;
}
在上述代碼中,RingBuffer_Put 函數用于向緩沖區寫入數據,RingBuffer_Get 函數用于從緩沖區讀取數據。通過使用取模運算,指針在達到緩沖區末尾時會回繞到起始位置,實現循環操作。
應用于 UART 接收中斷
在串口通信中,接收數據通常通過中斷方式進行處理。每當接收到一個字節的數據時,接收中斷服務程序(ISR)會被觸發。為了防止在高頻率接收數據時丟失數據,可以在 ISR 中將接收到的數據存入環形緩沖區。
RingBuffer rxBuffer;void USART_RX_IRQHandler(void) { uint8_t data = USART_ReadData(); // 讀取接收到的數據
RingBuffer_Put(&rxBuffer, data); // 將數據存入環形緩沖區}
在主循環或其他任務中,可以定期檢查環形緩沖區,并處理其中的數據:
void ProcessReceivedData(void) { uint8_t data; while (RingBuffer_Get(&rxBuffer, &data)) { // 處理接收到的數據
}
}
這種方式可以有效地緩解中斷處理壓力,防止數據丟失。
應用于 SPI 通信
在 SPI 通信中,尤其是主設備從多個從設備接收數據的情況下,數據可能會以較高的速率到達。使用環形緩沖區可以暫存接收到的數據,等待主循環或其他任務進行處理。
RingBuffer spiRxBuffer;void SPI_RX_IRQHandler(void) { uint8_t data = SPI_ReadData(); // 讀取接收到的數據
RingBuffer_Put(&spiRxBuffer, data); // 將數據存入環形緩沖區}
在主循環中處理接收到的數據:
void ProcessSPIData(void) { uint8_t data; while (RingBuffer_Get(&spiRxBuffer, &data)) { // 處理 SPI 接收到的數據
}
}
這種方式可以提高 SPI 通信的可靠性,防止數據丟失。
優化建議
緩沖區大小:根據實際應用的數據速率和處理能力,合理設置緩沖區的大小。
中斷優先級:確保接收中斷的優先級足夠高,以及時響應數據接收。
線程安全:在多線程或多任務系統中,訪問環形緩沖區時需要考慮線程安全,可能需要使用互斥鎖或禁用中斷等方式。
溢出處理:在緩沖區滿的情況下,可以選擇覆蓋舊數據、丟棄新數據或設置標志位通知主程序處理。
通過合理地設計和實現環形緩沖區,可以顯著提高嵌入式系統中串口、SPI 等通信接口的數據處理能力,減少數據丟失的風險,提高系統的穩定性和可靠性。

評論