FPGA:SPI接口

SPI可以用作FPGA和其他芯片之間簡單有效的通信方式。
本文引用地址:http://www.czjhyjcfj.com/article/202401/454461.htm
SPI 1 - 什么是SPI?
SPI是一個簡單的接口,允許一個芯片與一個或多個其他芯片進行通信。
它看起來如何?
讓我們從一個簡單的例子開始,其中只有兩個芯片必須一起通信。
SPI 需要在兩個芯片之間使用 4 根線。
如您所見,這些電線被稱為 SCK、MOSI、MISO 和 SSEL,其中一個芯片是“主芯片”,另一個芯片是“從芯片”。
SPI基礎知識
基本上:
它是同步的。
它是全雙工串行。
它不是即插即用的。
有一個(也只有一個)主站和一個或多個(或多個)從站。
更多細節:
同步:時鐘由主機生成。
全雙工串行:數據被串行化,在每個時鐘周期內向每個方向傳輸一位數據,因此使用兩條數據線(MOSI 和 MISO)。
非即插即用:主站和從站事先知道通信的細節(位順序、交換的數據字長度等)。
一個主站:從站不能發起通信,只有主站可以。從屬設備傾聽并做出回應。
簡單轉移
假設主站和從站需要 8 位數據傳輸,首先傳輸 MSB。
以下是單個 8 位數據傳輸的樣子。

MOSI線是“主輸出”,而MISO是“從輸出”。 由于SPI是全雙工的,兩條線同時切換,從主到從,從從到主,從到主。
更多細節:

主站下拉 SSEL 以向從站指示通信正在啟動(SSEL 處于低電平有效狀態)。
主機切換時鐘八次,并在其 MOSI 線路上發送 8 個數據位。同時,它從MISO線路上的從站接收8個數據位。
主站向上拉 SSEL 以指示傳輸已結束。
如果主服務器有多個 8 位數據要發送/接收,則它只能在發送/接收完成后繼續發送/接收并取消置位 SSEL。
多個從站
SPI主機可以通過兩種方式與多個從機通信:并行連接大多數信號并添加SSEL線,或者通過鏈接從機。
使用多 SSEL 線路技術時,一次只能激活一條 SSEL 線路,并且未選擇的從站不得驅動 MISO 線路。
它有多快?
SPI可以輕松實現幾Mbps(兆比特/秒)。 這意味著它可以用于未壓縮的音頻或壓縮的視頻。
SPI 2 - 簡單的實現
ARM 處理器
為了有機會測試我們新獲得的 SPI 知識,我們使用了 Saxo-L 板。 它有一個 ARM7 處理器 (LPC2138) 和一個 Cyclone FPGA (EP1C3),通過 SPI 總線連接。
ARM 用作 SPI 主機,而 FPGA 用作 SPI 從機。 Saxo-L ARM 處理器實際上有兩個 SPI 接口,一個稱為 SPI0,另一個更高級的稱為 SPI1/SSP。 它們都同樣易于使用。我們在 Saxo-L 上使用 SPI1/SSP,因為它已預先接線在電路板上。

SPI 主機 - C ARM 代碼
使用 SSP 只需初始化幾個寄存器,然后寫入/讀取數據以自動發送/接收。
void main(void)
{
// initialize SSP
SSP0CPSR = 0x02; // SSP max speed
SSP0CR0 = 0x07; // SSP max speed, 8 bits
SSP0CR1 = 0x02; // SSP master mode
PINSEL1 = 0x2A8; // SSP mode for pins P0.17 to P0.20
while(1)
{
// send two bytes
SSP0DR = 0x55; // one nice thing about the SSP is that it has a 8-words deep FIFO
SSP0DR = 0x54; // so here we write the data to be sent without worrying
// now wait until both bytes are sent
while(!(SSP0SR & 0x01));
// now we can read the two bytes received... and do anything with them
int data1 = SSP0DR;
int data2 = SSP0DR;
// ...
}
}
SPI 從機 - HDL FPGA 代碼
現在是FPGA中的SPI從機。
由于SPI總線通常比FPGA工作時鐘速度慢得多,因此我們選擇使用FPGA時鐘對SPI總線進行過采樣。 這使得從機代碼稍微復雜一些,但其優點是SPI邏輯在FPGA時鐘域中運行,這將使以后的工作變得更容易。
首先是模塊聲明。
module SPI_slave(clk, SCK, MOSI, MISO, SSEL, LED);
input clk;
input SCK, SSEL, MOSI;
output MISO;
output LED;
請注意,我們有“clk”(FPGA 時鐘)和一個 LED 輸出......一個不錯的小調試工具。 “clk”需要比 SPI 總線更快。Saxo-L 的默認時鐘為 24MHz,在這里工作正常。
我們使用 FPGA 時鐘和移位寄存器對 SPI 信號(SCK、SSEL 和 MOSI)進行采樣/同步。
// sync SCK to the FPGA clock using a 3-bits shift register
reg [2:0] SCKr;
always @(posedge clk) SCKr <= {SCKr[1:0], SCK};
wire SCK_risingedge = (SCKr[2:1]==2'b01); // now we can detect SCK rising edges
wire SCK_fallingedge = (SCKr[2:1]==2'b10); // and falling edges
// same thing for SSEL
reg [2:0] SSELr;
always @(posedge clk) SSELr <= {SSELr[1:0], SSEL};
wire SSEL_active = ~SSELr[1]; // SSEL is active low
wire SSEL_startmessage = (SSELr[2:1]==2'b10); // message starts at falling edge
wire SSEL_endmessage = (SSELr[2:1]==2'b01); // message stops at rising edge
// and for MOSI
reg [1:0] MOSIr;
always @(posedge clk) MOSIr <= {MOSIr[0], MOSI};
wire MOSI_data = MOSIr[1];
現在,從 SPI 總線接收數據很容易。
// we handle SPI in 8-bits format, so we need a 3 bits counter to count the bits as they come in
reg [2:0] bitcnt;reg byte_received; // high when a byte has been received
reg [7:0] byte_data_received;
always @(posedge clk)begin
if(~SSEL_active)
bitcnt <= 3'b000; else
if(SCK_risingedge) begin
bitcnt <= bitcnt + 3'b001;
// implement a shift-left register (since we receive the data MSB first)
byte_data_received <= {byte_data_received[6:0], MOSI_data}; end
end
always @(posedge clk) byte_received <= SSEL_active && SCK_risingedge && (bitcnt==3'b111);
// we use the LSB of the data received to control an LEDreg LED;
always @(posedge clk) if(byte_received) LED <= byte_data_received[0];
最后是傳動部分。
reg [7:0] byte_data_sent;
reg [7:0] cnt;
always @(posedge clk) if(SSEL_startmessage) cnt<=cnt+8'h1; // count the messages
always @(posedge clk)if(SSEL_active)begin
if(SSEL_startmessage)
byte_data_sent <= cnt; // first byte sent in a message is the message count else
if(SCK_fallingedge) begin
if(bitcnt==3'b000)
byte_data_sent <= 8'h00; // after that, we send 0s else
byte_data_sent <= {byte_data_sent[6:0], 1'b0};
end
end
assign MISO = byte_data_sent[7]; // send MSB first
// we assume that there is only one slave on the SPI bus
// so we don't bother with a tri-state buffer for MISO
// otherwise we would need to tri-state MISO when SSEL is inactiveendmodule
我們已經在 ARM 和 FPGA 之間建立了通信!
運行代碼
當我們逐步執行 ARM 代碼時,我們可以看到 LED 的狀態發生變化,以及 FPGA 返回的數據。
現在讓我們看看我們是否可以用SPI做一些有用的事情。
SPI 3 - 應用
LCD接口
由于我們已經知道如何驅動圖形 LCD 面板,尤其是在文本模式下,讓我們嘗試從 LPC 中寫出文本。
從FPGA的角度來看,LCD控制器使用幾個blockram來保存字體,字符顯示等... 因此,我們只需要確保SPI數據進入模塊即可。
從ARM的角度來看,將數據發送到LCD模塊的功能稱為“SSP_WriteBlock”。
// function used to write in the LCD blockrams
void SSP_WriteBlock(char* ob, int len, int addr);
void LCD_PutString(char* s, int x, int y)
{
// the blockram that holds the characters starts at address 0, and have 80 characters per line
SSP_WriteBlock(s, strlen(s), x+y*80);
}
void main(void)
{
SSP_init();
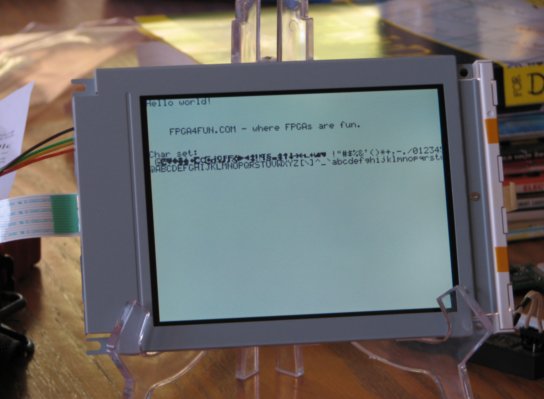
LCD_PutString("Hello world!", 0, 0);
LCD_PutString("FPGA4FUN.COM - where FPGAs are fun.", 4, 3);
LCD_PutString("Char set:", 0, 7);
int i; for(i=0; i<128; i++) LCD_PutChar(i, i, 8);
LCD_Cursor_off();
}
使用 LCD 控制器配置 FPGA 并運行 ARM 代碼后,我們得到以下結果:













評論