異步電機混合模型轉子磁鏈觀測器學習

調速系統中的電機控制技術的根本的目的實現轉矩精準、迅速的控制。以矢量控制的概念為基礎,達到對電機的磁鏈、轉矩分別控制的目的前提是轉子的磁場定向控制系統需要通過控制定子電流的勵磁分量使得轉子磁鏈幅值恒定,而后由控制定子電流轉矩分量來實現調節轉矩以及實現控制調節轉速的目的。
本文引用地址:http://www.czjhyjcfj.com/article/202212/441229.htm一、引言
調速系統中的電機控制技術的根本的目的實現轉矩精準、迅速的控制。以矢量控制的概念為基礎,達到對電機的磁鏈、轉矩分別控制的目的前提是轉子的磁場定向控制系統需要通過控制定子電流的勵磁分量使得轉子磁鏈幅值恒定,而后由控制定子電流轉矩分量來實現調節轉矩以及實現控制調節轉速的目的。為了實現這一目標,就必須獲得較為精準的轉子磁鏈的幅值和空間位置信息, 在實用中通常使用磁鏈觀測這一手段來實現。磁鏈觀測器應實現兩個目標:一是獲得的轉子磁鏈幅值;二則需要確保轉子磁場定向的準確性,從而獲得實時的磁鏈空間位置角度以用于坐標變換。
觀測異步電機轉子磁鏈的基本方法有兩種:電流模型法和電壓模型法。電流型轉子磁鏈觀測通過定子電流和電機轉速來計算轉子磁鏈;而電壓模型則通過定子電壓和定子電流進行計算,需要對電機的反電動勢進行積分。電流型方法中由于需要實時轉速信息和轉子時間常數的不穩定性,故通常適用于低速情況,而電壓型觀測方法則不需要轉速信息,更適合中、 高速以及無速度傳感應用場合,但純積分環節則會帶來的零點漂移和初值問題,且低速時下定子電阻壓降會造成觀測 結果的誤差; 本文為了克服兩種觀測模型在高、 低速應用場合的缺點,結合二者在不同速度場合的特點和實用性,介紹了電壓-電流混合模型進行轉子磁鏈觀測器。
二、混合模型轉子磁鏈觀測器介紹

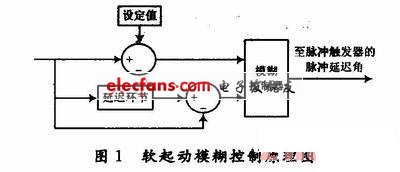
圖1 混合模型磁鏈觀測器控制框圖
由圖1 混合模型磁鏈觀測器控制框圖可知,混合模型由PI調節器連接電流模型和電壓模型磁鏈觀測器組成。
在兩相靜止坐標系下,定子磁鏈的兩個分量調節器參 數相同,采用PI控制器進行電壓模型補償后,電壓-電流 混合模型閉環磁鏈觀測器的簡化框圖如圖2所示。

圖2 混合模型磁鏈觀測器的簡化框圖

混合模型磁鏈觀測器的輸出合成的轉子磁鏈是電壓模型和電流模型按一定比例合成的,其中權重系數是觀測器的特征函數。合理設計PI補償控制來實現電流、電壓模型之間的平滑切換時設計的重點。可以看到在電機零速時,電壓模型的輸入值是電流模型的計算值,從而解決的電壓模型的積分初始值設定的問題。用PI控制器補償電壓解決了電壓 模型在低速時受到定子電阻參數誤差影響較大的問題和純積分環節的零漂問題。

圖3 不同轉子磁鏈觀測器的特征函數
將混合模型的特征函數代入到統一特性方程中,得到如下公式:



三、混合模型轉子磁鏈觀測器仿真模型搭建

圖4 混合模型磁鏈觀測器系統仿真

圖5 異步電機矢量控制仿真波形變化情況

圖6 混合模型磁鏈觀測器磁鏈估計變化情況
從圖6可以發現,在改變轉速和突然加載的情況下,混合模型磁鏈觀測器都能準確的估算出轉子磁鏈。
四、總結
電流型磁鏈觀測器的在低速時能夠得到較為的轉子磁鏈觀測值,而隨著速度的增加,觀測器受到電機參數的影響越來越大,觀測誤差也越大,已經不能正常工作;而電壓型磁鏈觀測器在低速時受到定子電阻壓降的影響較大,不能得到的轉子磁鏈,隨著系統速度的增加,定子電阻壓降的影響將會越來越小,觀測器能夠得到較為的轉子磁鏈觀測值;混合模型磁鏈觀測器在低速和高速情況下,都能得到較為的轉子磁鏈觀測值,而且在觀測器模型切換和電壓補償時 沒有出現明顯的振蕩。本文結合電壓型、電流型轉子磁鏈觀測器的優缺點,介紹了混合模型轉子磁鏈觀測器,通過電流模型得到的觀測結果對電壓模型進行修正,從而在保留了電壓型磁鏈觀測器高速性能優良的基礎上,優化了觀測器在低速情況下的性能,保證混合模型磁鏈觀測器在電機全速范圍均能達到較好的觀測結果,確保整個系統的穩定性,仿真結果證明了此方案的可行性。





評論