RISC-V單片機(jī)快速入門05-玩轉(zhuǎn)ESP8266 WIFI模塊②

前言:
本文引用地址:http://www.czjhyjcfj.com/article/202006/414785.htm上一節(jié),我們使用串口工具發(fā)送AT指令操作ESP-01S,本節(jié),使用GD32VF103代替?zhèn)髋脊ぞ咄瓿珊?a class="contentlabel" href="http://www.czjhyjcfj.com/news/listbylabel/label/ESP-01S模塊">ESP-01S模塊的交互過(guò)程。
一、基礎(chǔ)知識(shí)
1.交互流程簡(jiǎn)介
(1)設(shè)備上電,先控制8266的復(fù)位引腳為低電平,讓模塊復(fù)位
(2)發(fā)送指令:ATE0,取消回顯
(3)發(fā)送指令:AT+CWMODE=2,設(shè)置ESP01S為AP模式
(4)發(fā)送指令:AT+CIPMUX=1,設(shè)置多路連接,AP模式最多支持5個(gè)設(shè)備連接
(5)發(fā)送指令:AT+CWSAP="ESP01S_test","12345678",1,3,啟動(dòng)一個(gè)WIFI熱點(diǎn)
(6)發(fā)送指令:AT+CIPSERVER=1,8089,啟動(dòng)TCP Server
(7)發(fā)送指令:AT+CIPSERVER=1,8089,啟動(dòng)TCP Server
(8)大循環(huán)中檢測(cè)是否收到ESP01S數(shù)據(jù),收到數(shù)據(jù)后立刻返回。
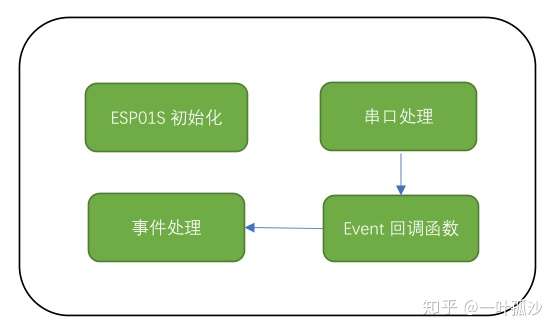
2.程序框架簡(jiǎn)介
程序主要包括如下4個(gè)功能模塊:ESP01S初始化、串口處理、Event回調(diào)函數(shù)、事件處理;串口處理模塊包括串口接收和定時(shí)器判斷一幀數(shù)據(jù)是否接收完成功能,Event回調(diào)函數(shù)主要用來(lái)通知應(yīng)用層系統(tǒng)的狀態(tài),方便應(yīng)用層做出相應(yīng),比如設(shè)備檢測(cè)到其他TCP Client客戶端接入模塊,可以控制LED狀態(tài),事件處理模塊主要包含應(yīng)用程序大循環(huán),大循環(huán)中檢測(cè)系統(tǒng)事件狀態(tài),根據(jù)事件狀態(tài)再大循環(huán)中做出響應(yīng)。
二、系統(tǒng)功能模塊詳述
1.Event回調(diào)函數(shù)
本程序使用了函數(shù)指針,應(yīng)用層將事件處理函數(shù)傳到hal_common.c中int hal_sys_contex_init(sys_status_fun fun, void *user_data)函數(shù)
void system_status_callback(int sock, int event)
{
system_context->sock_id = sock;
system_context->event = event;
switch (event)
{
case STA_CONNECTED:
rt_kprintf("Sock %d connected!rn", sock);
break;
case STA_CLOSED:
rt_kprintf("Sock %d closed!rn", sock);
break;
case STA_DATA_ARRIVED:
rt_kprintf("Sock %d data arrived!rn", sock);
break;
default:
break;
}
}
typedef enum {
STA_CONNECTED,
STA_CLOSED,
STA_DATA_ARRIVED, // clients send data to wifi
STA_EVENT_MAX,
}sys_event_e;
typedef void (*sys_status_fun)(int sock, int event);
typedef struct sys_ctx{
int sock_id;
sys_event_e event;
char data_buf[SYS_CTX_UART_RECV_SIZE];
sys_status_fun sys_status_cb;
void *user_data;
}sys_ctx_t;
int hal_sys_contex_init(sys_status_fun fun, void *user_data)
{
sys_contex.sys_status_cb = fun;
sys_contex.user_data = user_data;
return 0;
}
int main(void)
{
hal_sys_contex_init(system_status_callback, RT_NULL);
while(1)
{
}
}2.串口處理
串口處理模塊包括串口接收和定時(shí)器判斷一幀數(shù)據(jù)是否接收完成功能,串口接收函數(shù)代碼如下:
#define RX_BUF_MAX_LEN 1024 //最大接收緩存字節(jié)數(shù)
struct STRUCT_USART_Fram_S //串口數(shù)據(jù)幀的處理結(jié)構(gòu)體
{
char Data_RX_BUF [ RX_BUF_MAX_LEN ];
uint16_t FramLength;
struct {
uint8_t FramStartFlag;
uint8_t FramFinishFlag;
} InfBit;
} ;
struct STRUCT_USART_Fram_S Esp8266_Frame_Record;
void USART2_IRQHandler()
{
uint8_t ch = -1;
if(RESET != usart_interrupt_flag_get(EVAL_COM2, USART_INT_FLAG_RBNE))
{
ch = usart_data_receive(EVAL_COM2);
// if ( Esp8266_Frame_Record.FramLength < ( RX_BUF_MAX_LEN - 1 ) ) //預(yù)留1個(gè)字節(jié)寫(xiě)結(jié)束符
// {
Esp8266_Frame_Record .Data_RX_BUF [ Esp8266_Frame_Record.FramLength ] = ch;
// }
Esp8266_Frame_Record.FramLength ++;
if (Esp8266_Frame_Record.FramLength >= 1024)
{
Esp8266_Frame_Record.FramLength = 0;
}
cnt = Esp8266_Frame_Record.FramLength;
// rt_kprintf(".......uart recv : %c, count is %drn", ch, cnt);
Esp8266_Frame_Record.InfBit.FramStartFlag = 1;
}
}中斷處理函數(shù)中,將接收的數(shù)據(jù)放到Esp8266_Frame_Record .Data_RX_BUF中,然后將
Esp8266_Frame_Record.InfBit.FramStartFlag置1,這個(gè)標(biāo)志位再定時(shí)器中會(huì)用到,可以用來(lái)判斷接收一幀數(shù)據(jù)是否完成。
一幀數(shù)據(jù)接收是否完成的判斷邏輯是:定時(shí)器會(huì)定期檢測(cè),如果FramStartFlag為1,說(shuō)明串口正在接收數(shù)據(jù),沒(méi)接收一個(gè)數(shù)據(jù),F(xiàn)ramLength加1,因此,當(dāng)進(jìn)入定時(shí)器中斷函數(shù),判斷FramStartFlag為1情況下FrameLength如果不再增加,說(shuō)明一幀數(shù)據(jù)接收完成。
static void timeout1(void *parameter)
{
int sock_id = -1;
char buff[128] = { 0x00 };
int len = 0;
sys_event_e event = STA_EVENT_MAX;
// rt_kprintf("timer's cnt is %d, FrameLength is %drn", cnt, Esp8266_Frame_Record.FramLength);
if (1 == Esp8266_Frame_Record.InfBit.FramStartFlag)
{
if (cnt == Esp8266_Frame_Record.FramLength && cnt != 0)
{
cnt = 0;
Esp8266_Frame_Record .Data_RX_BUF [ Esp8266_Frame_Record.FramLength ] = 0x00;
rt_kprintf("timer --------> data %srn", Esp8266_Frame_Record.Data_RX_BUF);
if (rt_strstr(Esp8266_Frame_Record.Data_RX_BUF, "CONNECT"))
{
sscanf(Esp8266_Frame_Record.Data_RX_BUF, "%d,%s", &sock_id, buff);
event = STA_CONNECTED;
}else if (rt_strstr(Esp8266_Frame_Record.Data_RX_BUF, "CLOSED"))
{
sscanf(Esp8266_Frame_Record.Data_RX_BUF, "%d,%s", &sock_id, buff);
event = STA_CLOSED;
}else if (rt_strstr(Esp8266_Frame_Record.Data_RX_BUF, "+IPD"))
{
rt_memset(hal_sys_contex_get()->data_buf, 0x00, SYS_CTX_UART_RECV_SIZE);
sscanf(Esp8266_Frame_Record.Data_RX_BUF, "%*[^+]+IPD,%d,%d:%[^r]", &sock_id, &len, hal_sys_contex_get()->data_buf);
event = STA_DATA_ARRIVED;
rt_kprintf("parsed +IPD :%srn", hal_sys_contex_get()->data_buf);
}
// call sys_status_cb
if (hal_sys_contex_get()->sys_status_cb)
{
hal_sys_contex_get()->sys_status_cb(sock_id, event);
}
Esp8266_Frame_Record.InfBit.FramFinishFlag = 1;
Esp8266_Frame_Record.InfBit.FramStartFlag = 0;
}else
{
cnt = Esp8266_Frame_Record.FramLength;
}
}else
{
cnt = 0;
Esp8266_Frame_Record.FramLength = 0;
}
}注意:事件處理本質(zhì)上是在此調(diào)用hal_sys_contex_get()->sys_status_cb(sock_id, event)映射到應(yīng)用層的void system_status_callback(int sock, int event)函數(shù)。
3.事件處理
事件處理的核心再while(1)中,根據(jù)系統(tǒng)當(dāng)前事件狀態(tài)做出響應(yīng),本節(jié)是檢測(cè)到事件為數(shù)據(jù)類型時(shí)候,將數(shù)據(jù)原路返回。
int main(void)
{
/* enable the LED clock */
rcu_periph_clock_enable(RCU_GPIOA);
/* configure LED GPIO port */
gpio_init(GPIOA, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_1);
gpio_bit_reset(GPIOA, GPIO_PIN_1);
// create iwdt_thread
dynamic_thread = rt_thread_create("led_thread", led_process_thread_entry,
RT_NULL, 512, 2, 10);
rt_thread_startup(dynamic_thread);
// init sys_ctx
hal_sys_contex_init(system_status_callback, RT_NULL);
system_context = hal_sys_contex_get();
hal_timer_init();
ESP8266_Init();
rt_thread_mdelay(1000);
ESP8266_Ate0();
tcp_server_init();
tcp_server_start();
while(1)
{
if (STA_DATA_ARRIVED == system_context->event)
{
// send back
ESP8266_SendString ( DISABLE, system_context->data_buf, rt_strlen(system_context->data_buf), system_context->sock_id );
}
rt_thread_mdelay(10);
}
return 0;
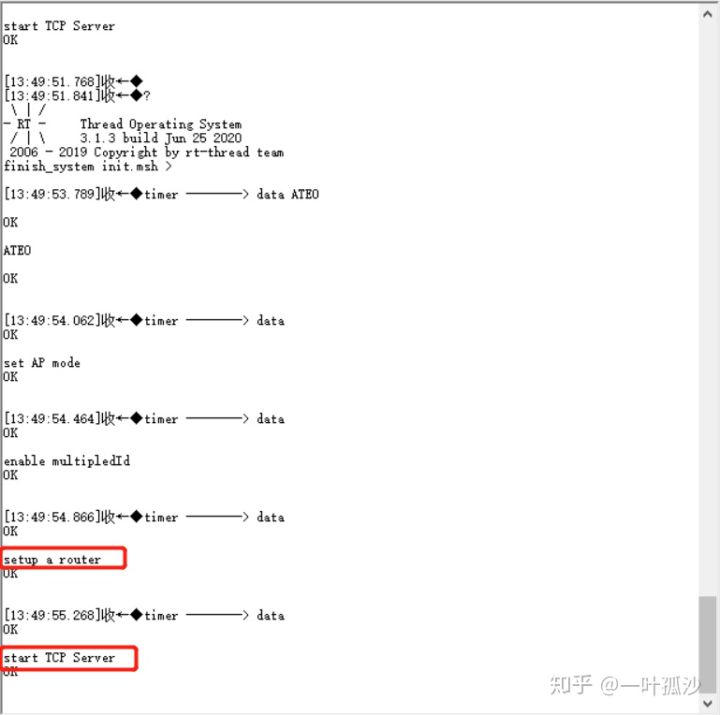
}三、運(yùn)行
下載程序完畢后,重啟設(shè)備,ESP01S啟動(dòng)一個(gè)WIFI熱點(diǎn),并啟動(dòng)TCP Server,log如下:
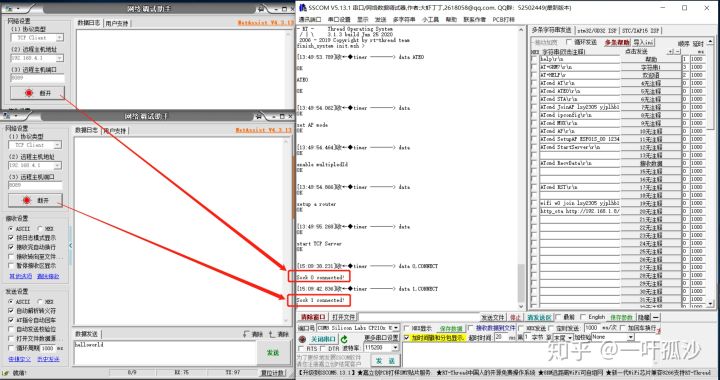
電腦連接熱點(diǎn),使用網(wǎng)絡(luò)助手連接192.168.4.1:8089
網(wǎng)絡(luò)助手發(fā)送數(shù)據(jù)給ESP01S
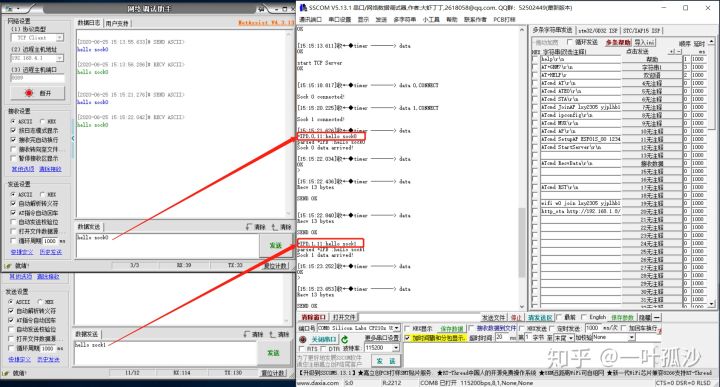
關(guān)閉網(wǎng)絡(luò)助手,應(yīng)用程序也可以檢測(cè)到,如下Log所示









評(píng)論