汽車自適應前照燈系統(AFS)工作原理及步進電機驅動器

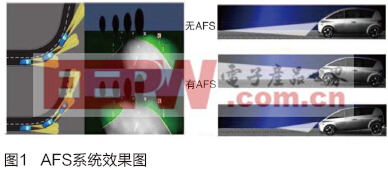
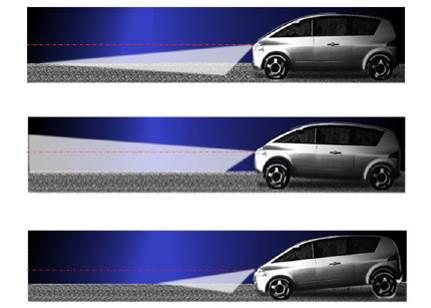
傳統汽車前照燈的燈光跟車身方向始終一致,在汽車轉彎時無法有效照明彎道內側的盲區,如果彎道內側恰好存在人或物體,而車速又未恰當降低,則會帶來安全隱患,如圖1所示。相比較而言,汽車自適應前照燈系統(AFS)功能可以提供旋轉(swiveling)調節效果,能夠根據方向盤的角度轉動,把有效的光束投射到駕駛者需要看清的前方路面上,幫助降低安全隱患。
本文引用地址:http://www.czjhyjcfj.com/article/201807/384701.htm
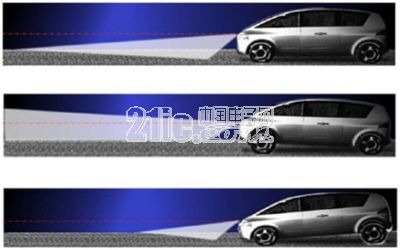
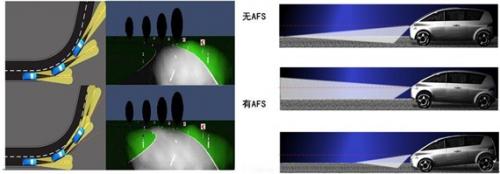
圖1:AFS功能的旋轉調節(上圖)及水平調節(下圖)照明效果。
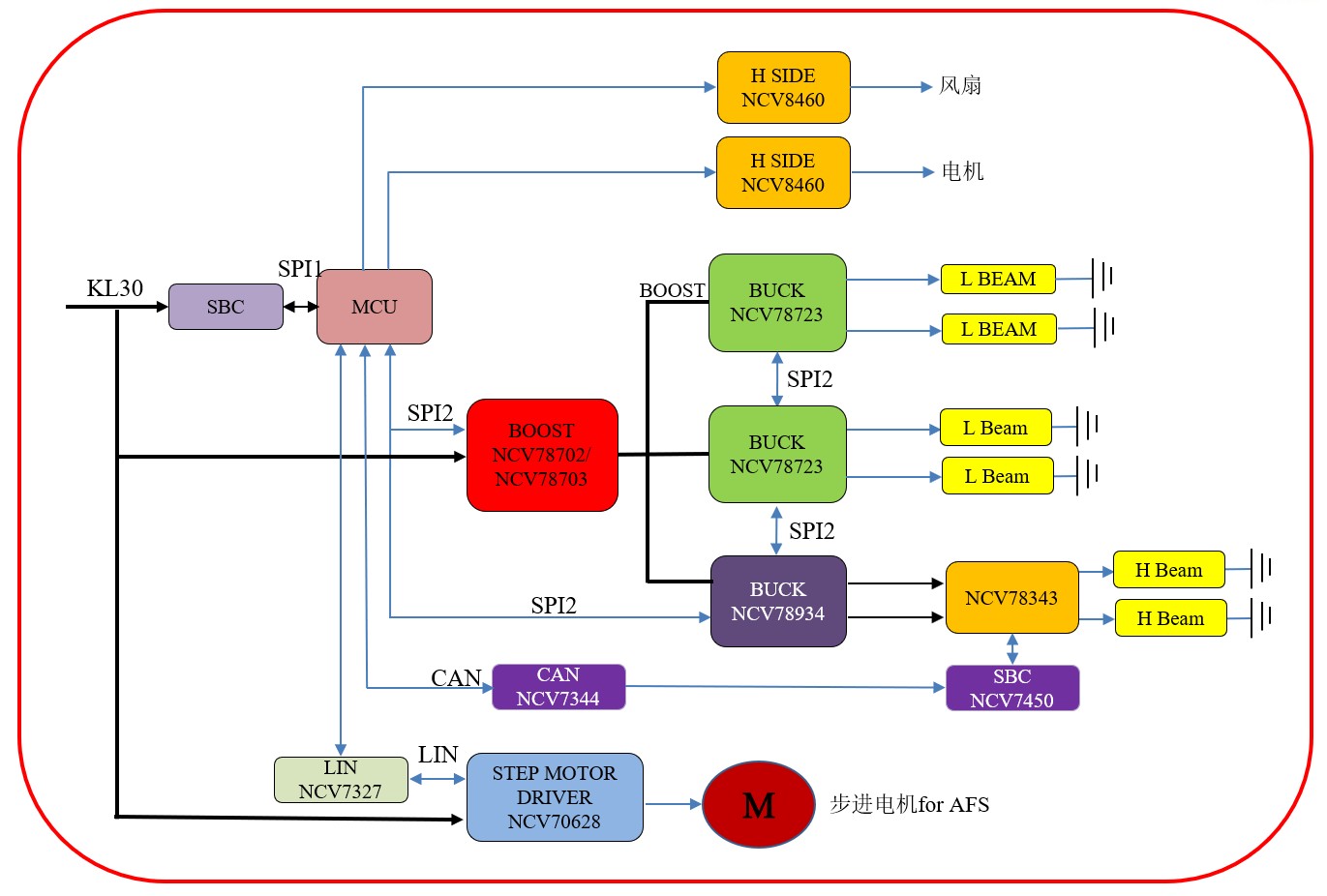
除了能夠進行動態旋轉調節,AFS功能還能提供動態水平高度調節。此功能根據負載軸傳感器的信號來調節前照燈的水平高度,可以適應不同的負載及不同的斜坡環境。如圖1右側中,上圖是AFS功能在正常水平條件下的燈光投身效果,中圖是在汽車啟動或上坡時路面顛簸條件下燈光上揚效果,下圖是在剎車或下坡條件下的燈光水平下沉照明效果。可見AFS可根據車身水平傾斜情況動態調節燈光高度,改善照明效果,增強安全性。AFS工作原理結構圖分別如圖2和圖3所示。
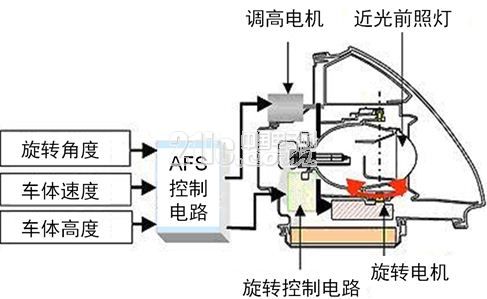
圖2:AFS的工作原理結構圖。
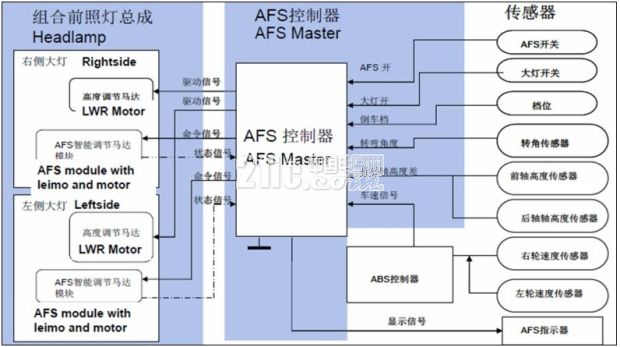
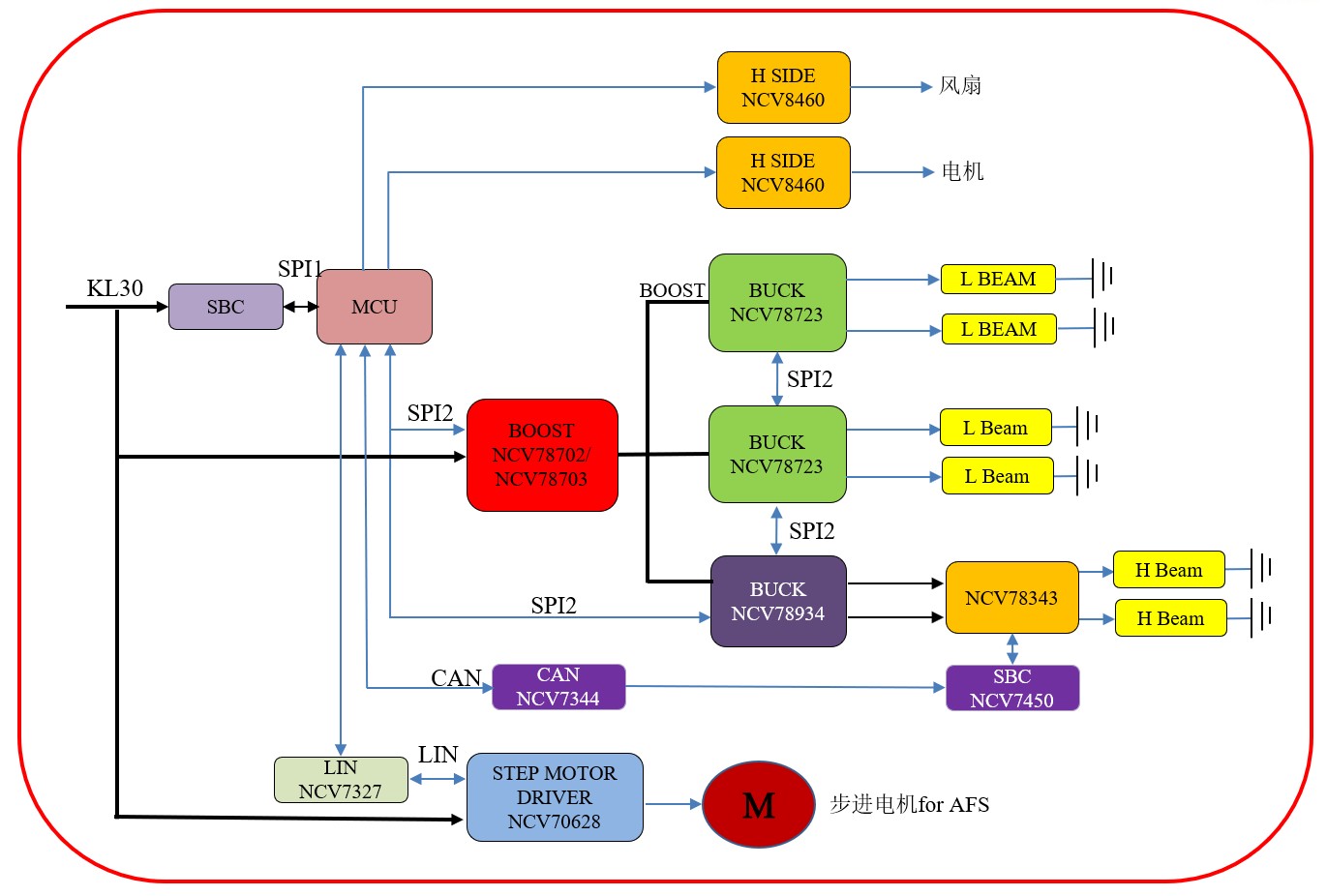
圖3:AFS的工作原理結構圖(續)。
步進電機驅動器的安放位置選擇
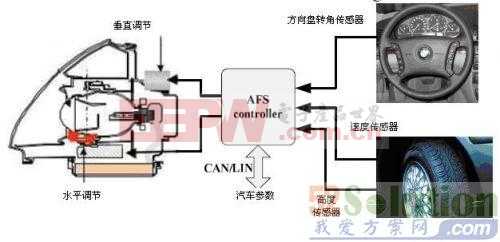
汽車AFS的旋轉及水平高度調節,是各使用一個步進電機來實現的,電機根據車輛四周的眾多傳感器反饋的數據作出反應,故設計人員需要采用適合的步進電機驅動方案,且安放在適合的位置。
控制AFS功能的步進電機驅動器的安放位置有兩種選擇。一種方法稱為直接驅動。這種方案中,步進電機驅動芯片安裝在跟主微控制器(MCU)同一印制電路板(PCB)上。此電路板離前照燈部件及相關步進電機較遠,而每個電機需要與對應的信號連接。
另一種方法是機電一體化。在這種方法中,步進電機驅動IC能夠直接安裝在步進電機結構內,僅需共享地線與LIN總線信號連接。這種方法極為有益,因為MCU與機電一體化模塊的接口連接只需要低電磁兼容性的總線。機電一體化方法采用模塊化設計,前照燈組件的維修保養方便,好處明顯。這兩種方法的結構示意圖如圖4所示。

圖4:兩種不同的步進電機驅動器安放方法。




評論