技術大講堂:最有效的鏡頭畸變校正“大法”

鏡頭畸變的產生是由于透鏡特性(凸透鏡匯聚光線、凹透鏡發散光線)在成像過程中對真實鏡像的一種透視失真,在鏡頭的制造過程中,如果想要消除鏡頭畸變,需要從鏡頭的光學設計入手,選取高質量的光學玻璃來制造鏡片,然而,這些手段并不能完全消除畸變,攝像機標定技術應運而生。
本文引用地址:http://www.czjhyjcfj.com/article/201706/352360.htm
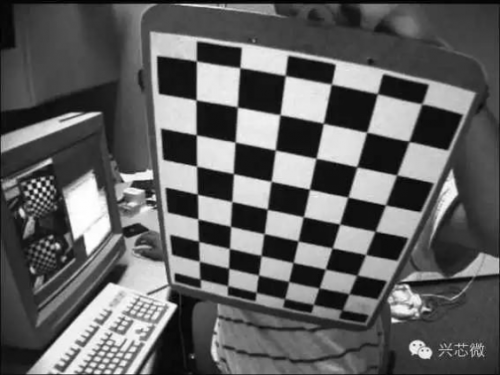
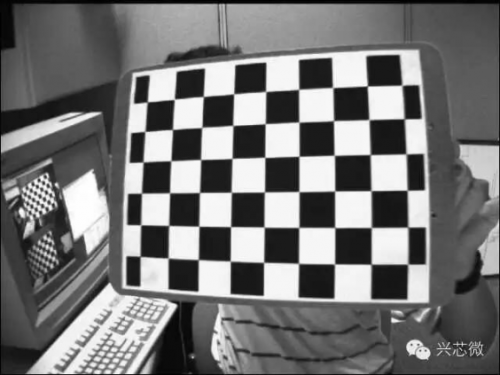
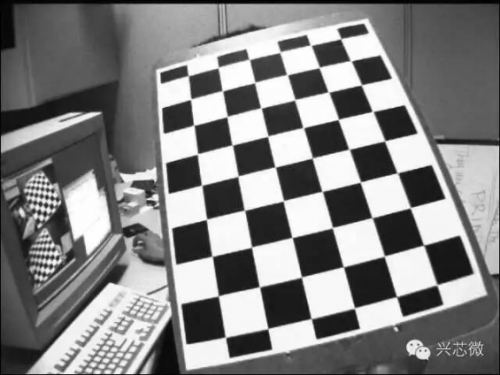
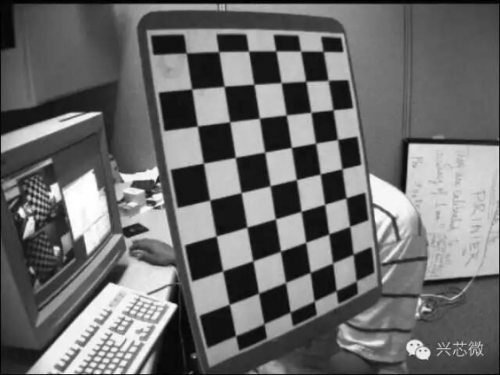
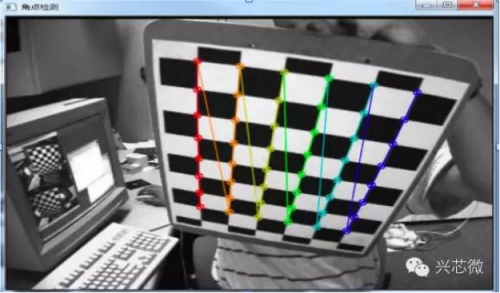
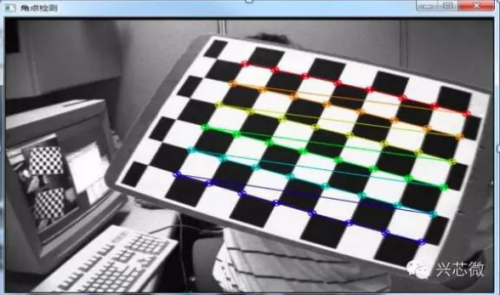
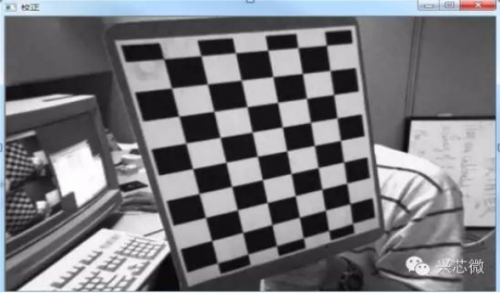
攝像機標定是通過建立攝像機成像的幾何模型,確定空間物體表面的三維幾何位置與其對應的圖像中的點之間的關系,最終得到相機參數。攝像機標定方法分為傳統攝像機標定、主動視覺攝像機標定和攝像機自標定三種方法。結合實際應用精度要求及操作復雜度等,目前最常用的畸變校正算法為模板法,其原理是:利用一個事先做好的模板(通常為黑白棋盤格),然后對模板進行拍攝,通過對拍攝前后提取的對應的特征點,根據事先建立的成像模型,通過數學方法對參數進行求解,再將求得的參數恢復沒有畸變的源圖像。
算法基本流程
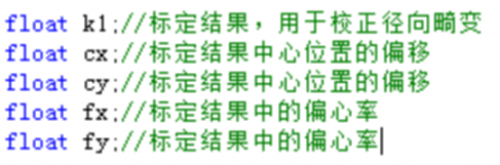
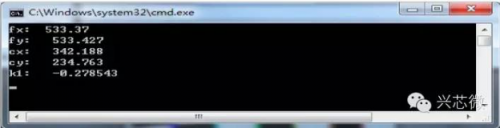
鏡頭標定:出廠前,通過自己編寫的軟件對每一個鏡頭進行標定,確定每個鏡頭的畸變參數。
校正:確定每個鏡頭的畸變系數,每次拍攝時通過硬件把圖像或幀校正后再輸出
畸變方程
根據小孔成像原理,建立成像方程:
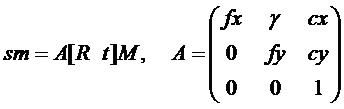
其中[R t]是成像過程中的旋轉和平移的外參,A就是需要標定的相機畸變內參。
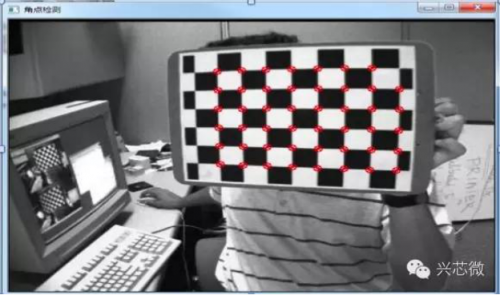
鏡頭標定
?通過拍攝的若干張照片建立方程組,求參數最優解
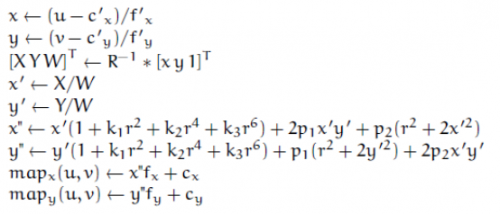
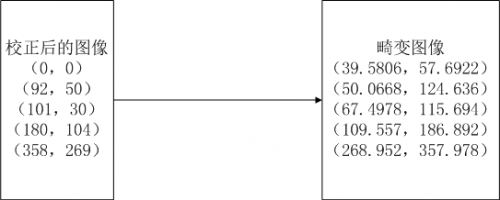
校正—坐標映射
?標定過程就是通過鏡頭標定求得參數得到坐標間的映射關系。

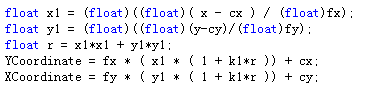
校正—插值


評論