Cortex-M3 (NXP LPC1788)之ADC數模轉換器的應用

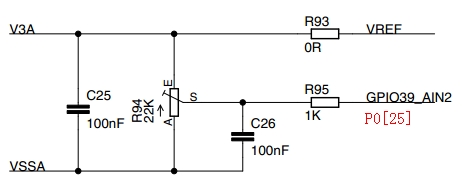
要使用ADC轉換,也要配置PCONP寄存器,配置ADC的時鐘以及管腳和中斷等。A/D轉換控制寄存器AD0CR用來設置ADC的通道,時鐘分頻,工作模式和啟動A/D轉換的方式。開發板使用的是AIN2即A/D轉換通道2,管腳為P0[25]。根據之前的文章,配置了系統的PCLK位60M,所以設置時鐘分頻5分頻,將ADC的時鐘設置成12M,而ADC完成一次轉換需要31個時鐘,所以ADC的轉換頻率約為400KHZ。AD0CR的START和EDGE用來控制ADC轉換的觸發方式,我們可以配置成通過定時器和外部中斷來觸發AD轉換以及觸發的邊沿的方式。
ADC轉換完成后,轉換的結果保存在A/D數據寄存器,有兩個數據寄存器,他們分別是全局數據寄存器AD0GDR和每個通道的數據寄存器AD0DR0~AD0DR7,他們包含了數據轉換結果和一些轉換的狀態標志。
ADC中斷使能寄存器AD0INTEN,控制每個通道轉換完成后是否產生中斷,以及全局數據寄存器AD0GDR中的DONE標志是否產生中斷。
下面的程序中,我將ADC配置成P2[10]外部中斷觸發AD轉換,AD轉換完成后會觸發AD中斷,在中斷中進行數據的處理。
- #include"LPC1788_REG.h"
- #include"uart.h"
- #definerIOCON_P0_25(*(volatileunsigned*)(0x4002C064))
- #definerIOCON_P2_10(*(volatileunsigned*)0x4002C128)
- #definerEXTINT(*(volatileunsigned*)0x400FC140)
- #definerEXTMODE(*(volatileunsigned*)0x400FC148)
- #definerEXTPOLAR(*(volatileunsigned*)0x400FC14C)
- #definerAD0CR(*(volatileunsigned*)(0x40034000))
- #definerAD0INTEN(*(volatileunsigned*)(0x4003400C))
- #definerADGDR(*(volatileunsigned*)(0x40034004))
- #definerAD0DR2(*(volatileunsigned*)(0x40034018))
- #definerAD0STAT(*(volatileunsigned*)(0x40034030))
- #definerAD0TRM(*(volatileunsigned*)(0x40034034))
- unsignedintadc_value;
- voidEINT0_IRQHandler()
- {
- rEXTINT|=(0x1<<0);//中斷產生之后必須清除改位
- Uart2SendS("SW6ON!rn");
- }
- voidADC_IRQHandler()
- {
- if(rAD0DR2&(1UL<<31))
- {
- adc_value=((rAD0DR2)>>4)&0xFFF;
- Uart2SendD(adc_value);
- Uart2SendS("rn");
- }
- else
- {
- Uart2SendC(x);
- }
- }
- voidEINT_INIT()
- {
- rEXTMODE|=0x1<<0;//配置成邊沿觸發
- rEXTPOLAR&=~(0x1<<0);//下降沿觸發
- rISER0=(0x1<<18);//打開EINT0中斷使能
- }
- intmain()
- {
- charmenu[]={"PressSW6togetaADC_Value.rn"};
- Init_Uart2();
- EINT_INIT();
- rPCONP|=0x1<<12;//使能PCADC功率控制
- rIOCON_P2_10=(rIOCON_P2_10&(~0x7))|(0x1<<0);//配置FUNC字段為EINT0模式
- rIOCON_P0_25&=~(0x1<<7);//P0[25]做模擬管腳
- rIOCON_P0_25&=~(0x3<<3);//無效上下拉電阻
- rIOCON_P0_25&=~0x7;//P0[25]作為ADC[2]功能
- rIOCON_P0_25|=0x1;
- rAD0CR|=0x1<<2;//使用通道2
- rAD0CR|=0x4<<8;//A/D轉換時鐘設置成12M
- rAD0CR|=0x1<<21;//A/D工作在正常模式
- rAD0INTEN|=0x1<<2;//使能A/D通道2轉換完中斷
- rAD0INTEN&=~(0x1<<8);//無視全局數據寄存器的DONE標志
- rAD0CR|=0x1<<27;
- rAD0CR&=~(0x7<<24);
- rAD0CR|=0x2<<24;//P2[10]下降沿出現時啟動轉換
- rISER0|=0x1<<22;//使能A/D中斷
- Uart2SendS(menu);
- while(1);
- }
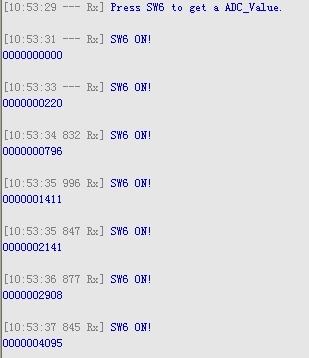
程序運行的效果是,按下控制P2[10]的按鍵,每按一次得到一個AD采樣的結果,改變R94的輸入,可以得到不同的結構,最大最小分別是0和4095。
1,P2[10]必須配置成EINT0模式,才能用于在邊沿上觸發ADC轉換。
2,必須關閉ADC輸入管腳的上拉或下拉電阻,否則AD采樣會有偏差。
3,ADC轉換完成的中斷使能,最好把AD0INTEN的最高位無效,否則需要在ADC轉換完成后同時清除通道數據寄存器AD0DRn和全局數據寄存器AD0GDR中的DONE標志(該標志通過讀取數據寄存器清除)。可以嘗試把程序中的rAD0INTEN &= ~(0x1<<8)屏蔽,可以看到串口一直在輸出x,即AD數據沒轉換完成,也有中斷一直產生。原因就是AD0GDR中的DONE標志引起。






評論