基于PLC的模糊神經(jīng)網(wǎng)絡(luò)控制策略的應(yīng)用

摘要:研究了模糊控制與神經(jīng)網(wǎng)絡(luò)兩者相結(jié)合構(gòu)成的模糊神經(jīng)網(wǎng)絡(luò)控制策略,實(shí)現(xiàn)了模糊神經(jīng)網(wǎng)絡(luò)控制算法在PLC中的軟件編程,它不依賴于被控對(duì)象精確的數(shù)學(xué)模型,將模糊神經(jīng)網(wǎng)絡(luò)控制器應(yīng)用于溫度控制系統(tǒng)中,獲得了良好的控制效果。
本文引用地址:http://www.czjhyjcfj.com/article/201610/309018.htm由于現(xiàn)代工業(yè)過程控制系統(tǒng)的復(fù)雜性,特別是被控對(duì)象的非線性、時(shí)變、時(shí)滯等特性,若采用常規(guī)的控制算法,往往很難獲得滿意的控制效果。所以對(duì)模糊控制、神經(jīng)網(wǎng)絡(luò)、遺傳算法、專家控制等智能控制策略的應(yīng)用研究尤為重要,特別是考慮將不同的控制算法進(jìn)行適當(dāng)結(jié)合,進(jìn)而能夠取長補(bǔ)短,獲得較好的控制效果。
可編程邏輯控制器PLC具有功能豐富、可靠性高、抗干擾能力強(qiáng)等技術(shù)優(yōu)勢(shì),并且PLC的數(shù)據(jù)處理、算術(shù)運(yùn)算等基本功能也在不斷增強(qiáng),通過研究將先進(jìn)的智能控制算法通過結(jié)構(gòu)化編程嵌入PLC,實(shí)現(xiàn)對(duì)一些不易建模或模型參數(shù)不確定的過程控制系統(tǒng)的實(shí)時(shí)控制。
1 可編程控制器
現(xiàn)代電子技術(shù)、通信技術(shù)及計(jì)算機(jī)技術(shù)的快速發(fā)展,PLC在硬件、軟件、功能、應(yīng)用等各方面都有大幅度提高,已由傳統(tǒng)的只能執(zhí)行簡單邏輯控制發(fā)展到具有數(shù)萬I/O規(guī)模、運(yùn)算和控制功能以及通信、聯(lián)網(wǎng)能力的綜合控制系統(tǒng),成為工業(yè)自動(dòng)控制的核心設(shè)備之一。
SIEMENS公司的S7-300 PLC在主要功能、擴(kuò)展性能等方面都比之前產(chǎn)品有很大提高。其性能特點(diǎn)主要包括:
1)擴(kuò)展性能好。
2)運(yùn)算速度快,編程功能強(qiáng)。
3)通信功能強(qiáng)。
2 模糊神經(jīng)網(wǎng)絡(luò)控制算法的PLC實(shí)現(xiàn)
2.1 模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
模糊控制是一種仿人思維的控制技術(shù),其著眼于將人的控制經(jīng)驗(yàn)和知識(shí)轉(zhuǎn)換為用語言變量描述的控制規(guī)則,用邏輯推理去處理各種模糊性的信息。模糊控制系統(tǒng)雖然在結(jié)構(gòu)上和各參數(shù)的物理意義上比較明確,但其缺乏自學(xué)習(xí)和自調(diào)整能力。
人工神經(jīng)網(wǎng)絡(luò)雖然在知識(shí)表達(dá)能力上比較欠缺,但其能實(shí)現(xiàn)對(duì)生物神經(jīng)網(wǎng)絡(luò)的功能模擬,具有極強(qiáng)的自學(xué)習(xí)、自適應(yīng)、并行處理和容錯(cuò)能力。
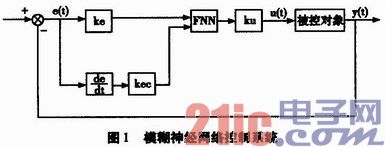
由此可見,模糊控制和神經(jīng)網(wǎng)絡(luò)這兩種智能控制策略具有很好的互補(bǔ)性,可將模糊控制和神經(jīng)網(wǎng)絡(luò)用合理的方式結(jié)合應(yīng)用,使其互相取長補(bǔ)短,通過發(fā)揮各自優(yōu)勢(shì)來構(gòu)造比單一控制策略更加完善的智能控制系統(tǒng),如圖1所示。
根據(jù)模糊理論和神經(jīng)網(wǎng)絡(luò)思想,設(shè)計(jì)四層模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),如圖2所示。
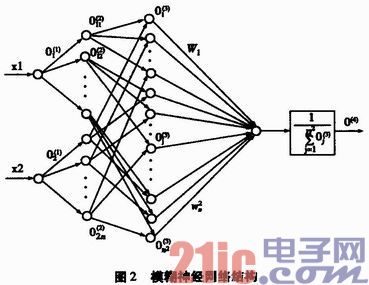
其中,第一層是用于將輸入信號(hào)傳送到下一層的輸入層;第二層是用于計(jì)算各輸入分量屬于各語言變量值模糊集合隸屬度函數(shù)的隸屬函數(shù)層;第三層是用于計(jì)算每條規(guī)則適用度的規(guī)則層,其每個(gè)節(jié)點(diǎn)表示一條模糊規(guī)則;第四層是用于實(shí)現(xiàn)歸一化計(jì)算的輸出層。
模糊與神經(jīng)網(wǎng)絡(luò)兩種智能控制的結(jié)合旨在通過神經(jīng)網(wǎng)絡(luò)的自學(xué)習(xí)和自適應(yīng)功能,對(duì)模糊控制規(guī)則的隸屬度函數(shù)參數(shù)和輸出層權(quán)系數(shù)進(jìn)行調(diào)整和優(yōu)化,從而達(dá)到滿意的控制效果。
2.2 控制算法的PLC實(shí)現(xiàn)
在STEP7軟件中用STL指令編程實(shí)現(xiàn)復(fù)雜的數(shù)學(xué)計(jì)算。系統(tǒng)采用結(jié)構(gòu)化編程方法,各個(gè)程序塊根據(jù)其各自控制功能進(jìn)行編程,主要功能程序模塊分配如下:
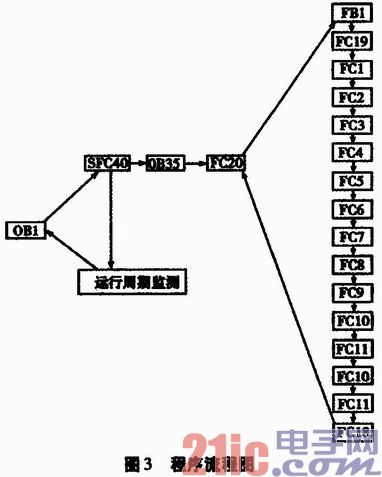
1)操作系統(tǒng)與用戶程序之間的接口模塊OB1,此模塊在執(zhí)行過程中調(diào)用功能模塊OB35,可監(jiān)控控制算法的最大運(yùn)行周期,使程序的實(shí)時(shí)性得以檢驗(yàn)。
2)循環(huán)中斷功能模塊OB35,由SFC4O(系統(tǒng)專用的中斷激活功能)啟動(dòng),按照CPU屬性中設(shè)定的時(shí)間間隔循環(huán)執(zhí)行,使模糊神經(jīng)網(wǎng)絡(luò)控制算法主程序FC20能被周期性地調(diào)用。
3)模糊神經(jīng)網(wǎng)絡(luò)控制算法主程序模塊FC20,是系統(tǒng)的核心程序,通過此模塊組織調(diào)用其它程序模塊(PC1-FC11、FC18、FC19、FB1)來實(shí)現(xiàn)控制系統(tǒng)的整體功能,即信號(hào)采集、運(yùn)算和輸出等。
4)用于存儲(chǔ)運(yùn)算過程中公共數(shù)據(jù)的共享數(shù)據(jù)模塊DB1、DB3。
5)完成網(wǎng)絡(luò)輸入層的運(yùn)算模塊FB1,根據(jù)輸入量與輸出量的比較,求取偏差和偏差的變化,作為模糊神經(jīng)網(wǎng)絡(luò)的輸入。
6)FC1模塊用來計(jì)算模糊神經(jīng)網(wǎng)絡(luò)隸屬函數(shù)層的輸出;FC2模塊用來模糊規(guī)則的匹配;FC3模塊用來計(jì)算模糊神經(jīng)網(wǎng)絡(luò)規(guī)則層的輸出;FC4模塊用來計(jì)算模糊神經(jīng)網(wǎng)絡(luò)輸出層的輸出;FC5模塊用來計(jì)算反傳誤差信號(hào)δ;FC6模塊用來計(jì)算權(quán)系數(shù)調(diào)節(jié)量△w;FC7模塊用來計(jì)算調(diào)整好的權(quán)系數(shù);FC8模塊用來計(jì)算反傳誤差信號(hào)δk;FC9模塊用來計(jì)算反傳誤差信號(hào)δ1j和δ2j;FC10模塊用來計(jì)算隸屬函數(shù)層參數(shù)調(diào)節(jié)量△aij和△ bij;FC11模塊用來計(jì)算調(diào)整后的隸屬函數(shù)層的參數(shù)aij和bij;FC18模塊用來進(jìn)行參數(shù)迭代運(yùn)算;FC19模塊用來計(jì)算b(i,j)的平方和立方;STEP7軟件中的功能程序模塊組織流程如圖3所示。
3 應(yīng)用實(shí)例
模糊控制和神經(jīng)網(wǎng)絡(luò)相結(jié)合的模糊神經(jīng)網(wǎng)絡(luò)控制策略主要用于對(duì)象模型未知或不確定的控制,將這種智能控制策略應(yīng)用于溫度控制,在控制對(duì)象模型不明確的條件下,實(shí)現(xiàn)對(duì)溫度的自動(dòng)控制。
3.1 系統(tǒng)的控制要求
在此溫控系統(tǒng)中,非金屬材料熱物性測(cè)定裝置是被控對(duì)象,裝置試件的溫度是被控變量,測(cè)溫儀表是熱電偶。系統(tǒng)的控制目的是使裝置試件的溫度保持恒定在設(shè)定值允許的誤差范圍之內(nèi),采取手段是通過控制單相整流固態(tài)調(diào)壓器的控制電壓來改變裝置試件的加熱電壓。
3.2 系統(tǒng)的硬件組成
控制系統(tǒng)的硬件設(shè)備主要包括:
1)PC機(jī)和通信裝置:使用安裝有SIEMENS公司編程軟件STEP7的PC機(jī)用于PLC程序的編輯,另外,為使PC機(jī)與PLC控制器連接通信實(shí)現(xiàn)程序的下載及PLC運(yùn)行狀態(tài)的監(jiān)測(cè)等,還需配備CP5613A2現(xiàn)場(chǎng)總線通信板卡。
2)控制器模塊配置:本系統(tǒng)采用現(xiàn)場(chǎng)總線通信技術(shù)構(gòu)成單主站形式的PROFIBUS-DP網(wǎng)絡(luò)系統(tǒng),主站控制器選用SIEMENS公司的S7-300PLC,CPU選用315-2PN/DP,另外配置兩個(gè)ET200M遠(yuǎn)程從站I/O站點(diǎn)模塊。
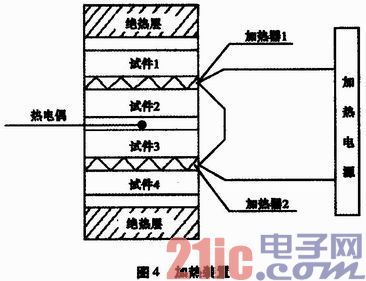
3)系統(tǒng)的被控對(duì)象:將非金屬材料熱物性測(cè)定裝置作為系統(tǒng)的被控對(duì)象,為保證材料熱物性測(cè)定的準(zhǔn)確性,所以對(duì)裝置試件的溫度大小有較高的要求。該裝置使用電加熱的方式進(jìn)行加溫,可通過控制加熱電壓的大小使裝置試件保持恒溫或使溫度保持在允許的范圍內(nèi)。
非金屬材料熱物性測(cè)定裝置的結(jié)構(gòu)如圖4所示。
4)電加熱裝置:該控制系統(tǒng)的執(zhí)行器選用單相整流固態(tài)調(diào)壓器(TGZ14),作為一種電加熱裝置。它可以提供可變直流加熱電壓,并通過改變晶閘管的相位來控制輸出電壓的大小,進(jìn)而改變裝置的加熱電壓,實(shí)現(xiàn)溫控。這種電加熱裝置的調(diào)節(jié)范圍很寬、使用壽命較長、能實(shí)現(xiàn)強(qiáng)電部分和弱電部分的隔離保護(hù)。
3.3 模糊控制器的設(shè)計(jì)
系統(tǒng)的控制思想是在建立模糊控制算法的基礎(chǔ)上,利用神經(jīng)網(wǎng)絡(luò)的自適應(yīng)和自學(xué)習(xí)功能對(duì)模糊控制規(guī)則的相關(guān)參數(shù)和系數(shù)進(jìn)行調(diào)整和優(yōu)化,從而獲得滿意的控制效果。所以,模糊控制器的設(shè)計(jì)至關(guān)重要。
模糊控制器的輸入是設(shè)定溫度值和試件實(shí)際溫度值的誤差以及試件溫度的變化率,輸出是表征PLC控制器模擬量輸出的內(nèi)部數(shù)字值的變化量。而且模糊控制器的輸入和輸出均需經(jīng)模糊化處理為模糊語言變量值。
根據(jù)模糊控制理論,制定模糊控制規(guī)則表,如表1所示。

根據(jù)表1,可進(jìn)行如下分析,當(dāng)實(shí)際溫度比設(shè)定溫度值大得多時(shí)(E=NB),若實(shí)際溫度的變化為上升趨勢(shì)(EC=PB),則對(duì)應(yīng)的△U=NB,即減小控制量;若實(shí)際溫度的變化為下降趨勢(shì)(EC=NB),則對(duì)應(yīng)的△U=ZE,即保持現(xiàn)有的控制量。
3.4 溫度控制系統(tǒng)調(diào)試
溫度設(shè)定值為80 ℃,控制器S7-300PLC每隔30 s經(jīng)A/D轉(zhuǎn)換模塊獲取實(shí)際溫度值,與設(shè)定溫度進(jìn)行比較后,經(jīng)模糊神經(jīng)網(wǎng)絡(luò)算法分析運(yùn)算后產(chǎn)生相應(yīng)輸出來控制加熱裝置的加熱電壓,實(shí)現(xiàn)對(duì)溫度的自動(dòng)控制。
1)記錄數(shù)據(jù)。包括在不同加熱電壓下的升溫、降溫過程的溫度值,以及溫度的變化率等。
2)利用模糊控制規(guī)則對(duì)STEP7軟件中的模糊神經(jīng)網(wǎng)絡(luò)控制器的網(wǎng)絡(luò)參數(shù)進(jìn)行初始化,并實(shí)現(xiàn)在線控制和網(wǎng)絡(luò)參數(shù)的調(diào)整。
3)根據(jù)調(diào)整后的網(wǎng)絡(luò)參數(shù)重新進(jìn)行初始化,并觀測(cè)控制效果。
控制器實(shí)時(shí)參數(shù)監(jiān)控界面如圖5所示。
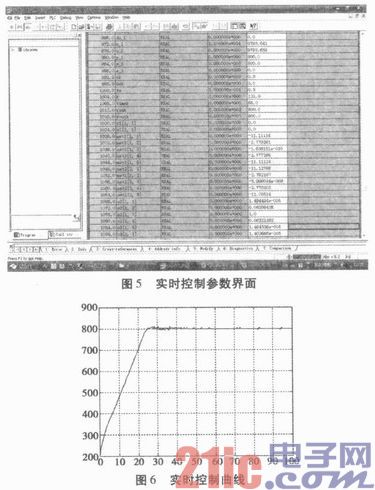
實(shí)時(shí)控制曲線如圖6所示。
4 結(jié)束語
溫度是工業(yè)自動(dòng)化領(lǐng)域中的重要控制參數(shù)之一,由于溫度控制過程具有大滯后、大慣性的特點(diǎn),所以要確定其精確的數(shù)學(xué)模型有一定難度。
基于PLC的模糊神經(jīng)網(wǎng)絡(luò)控制策略不依賴于過程精確的數(shù)學(xué)模型,將其應(yīng)用于溫度控制系統(tǒng),在規(guī)定的溫度范圍內(nèi),響應(yīng)







評(píng)論