ADXL345與EB3631在GPS導航中的應用

摘要:為實現用戶到目標點的距離測量和方向控制,設計并實現了基于加速度傳感器ADXL345和EB3631的GPS模塊的實時導航系統。系統選用EB3631搭建GPS模塊,通過串口與ATMEGA644P控制器通信采集GPS定位信息;采用加速度傳感器ADXL345,通過IIC協議與控制器通信實現位移測量。在0m-500m范圍內,時系統穩定性和準確性的反復測試,最終實現了相對誤差在10%以內的準確度較高的導航系統。
本文引用地址:http://www.czjhyjcfj.com/article/201610/308983.htm隨著GPS用戶設備價格不斷下降及GPS應用研究的不斷深入,大量GPS定位導航系統被應用于航海、飛機的導航、導彈衛星測控、精密授時、石油開采等方面。由于受測量環境的干擾或者信號被阻擋導致GPS不能定位,同時受GPS定位芯片的影響,使得GPS接收機定位精度大大降低。為解決這些問題,獲得精準的定位。文中以三軸加速度傳感器ADXL345為基礎,詳細描述了基于第三代GPS芯片EB3631的硬件和軟件設計方案,使得用戶可以實時獲取當前位置到目標位置的距離及方位,系統實用性較高。
1 硬件設計
GPS測距系統總體設計框架如圖1所示。主控制器采用基于AVR內核的8位低功耗控制器ATMEGA644P,芯片具有64K的片內FLASH,2K的EEPROM,4K的片內SRAM。芯片通用I/O接口32個,集成了IIC接口、SPI接口、JTAG接口及8通道的10為ADC轉換接口,豐富的外圍接口,能更好的滿足系統的設計要求。GPS MODULE采用臺灣環天公司的EB3631為核心器件,由于采用TTL電平輸出,可以直接通過串口與控制器進行通信,為用戶提供定位信息。三軸加速度傳感器ADXL345實現加速度的測量,從而得到用戶位移。電源模塊采用8節AA電池,經過π型濾波電路,LM7805穩壓為ATMEGA644P、LCD1602液晶提供5 V電壓,5 V電壓經過AMS1117系列低壓差穩壓芯片穩壓,為GPS模塊和加速度傳感器ADXL345供電。

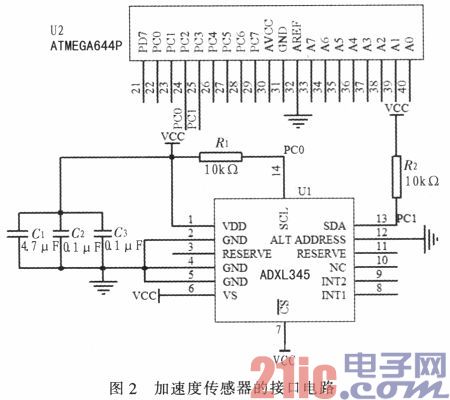
1.1 加速度傳感器接口電路
ADXL345是ANALOG DEVICES公司的一款數字式的三軸加速度感器,測量范圍最小+2g,測量范圍最大達到±16g。芯片輸出數據采用16位的二進制補碼形式,控制器可以通過三線制或四線制SPI接口訪問,也可以通過IIC接口訪問。ADXL345非常適合移動設備應用,不僅可以測量靜態重力加速度,還可以測量運動或者沖擊導致的動態加速度。芯片分辨率非常高,能夠測量傾斜角度小于1°的變化。ADXL345的工作流程為:首先由三軸敏感單元感知3個方向的比力,通過電子感應器件獲得模擬量,經過AD轉換為數字信號,經過數字濾波后送往控制欲中斷邏輯,在命令字的控制下通過I/O口與控制器交互。
ADXL345在IIC模式下工作時,CS引腳必須接VDD,芯片支持單字節或多字節的讀寫,讀寫地址是由7位的IIC器件地址和R/W位組成。IIC器件地址與ALT ADDRESS引腳的邏輯電平密切相關,當ALT ADDRESS引腳處于高電平時,7位器件地址是0x1D,相應的讀寫地址就轉換為0x3B,0x3A;當ALT ADDRESS引腳處于低電平時,7位器件地址是0x53,相應的讀寫地址就轉換為0xA7,0xA6[4];加速度傳感器的接口電路如圖2所示。SCL作為IIC總線的時鐘線,SDA是IIC總線的數據線,通過1~20K上拉電阻至VDD;INT1、INT2是ADXL345的中斷引腳。
1.2 NMEA-0813協議
NMEA-0813是美國海洋電子協會為海用電子設備制定的標準格式,數據輸出采用ASCII碼字符,目前廣泛采用的版本是V2.0。數據傳輸以$開始,后面的是5個字母的語句頭。其中語句頭的前兩個字母代表系統“ID”,如果是GP,則表示該語句屬于GPS定位系統;如果是HC,則表示該語句屬于羅經方位系統。語句“ID”由最后3個字母決定,語句頭之后是數據集合,不同類型的數據字段以“,”分割,每條語句以回車換行符結束。
$GPGGA是GPS定位系統中標準的GPS定位信息語句,$GPRMC是推薦最小的定位信息語句。GPS數據傳輸采用標準的RS232異步傳輸,通信的波特率一般默認是4800,1個起始位,8個數據位,一個停止位,無奇偶校驗位。
1.3 EB3631 GPS模塊設計
GPS(Global Positioning System),也是我們通常所說的全球定位系統,一個完整的GPS定位系統由太空部分、監控部分、用戶部分組成。用戶部分由GPS接收機、數據處理軟件及相應的設備組成,GPS接收機是由前置放大器、信號處理、控制與顯示、記錄和供電單元組成。GPS系統定位的原理:每顆GPS衛星時刻發送自身的位置和時間信號,用戶接收機可以測量出每顆衛星到接收機的時間延遲,根據信號傳輸的速度,將速度與時間延遲相乘便可得出接收機到不同衛星的距離。三維坐標、速度和時間的確定至少需要接收到4顆衛星的數據才能解算。
基于EB3631的GPS接收板,是高性能的、低功耗的GPS接收板。核心器件采用第三代芯片SiRFstar III,高速的GPS芯片,-159dBm超高的靈敏度,4Mb的flash存儲空間,該芯片具有兩個串行口,方便與ATMEGA644P控制器通信,采用NMEA-0183和SIRF binary協議,一次最大可接收20顆衛星,即使在信號很微弱的環境,定位也很快。圖3所示是GPS接口電路。
2%20軟件設計
GPS測距系統的軟件開發采用WINAVR/GCC編譯器,程序設計采用模塊化方式編寫,其中包括ADXL345測量程序、GPS接收程序、LCD1602液晶驅動程序。在編寫程序前需要采集目標點坐標,這些數據將存儲在ATMEGA644P控制器的片內2K的EEPROM中,在PC機上通過Google地圖獲得目標點經緯度坐標。表1所示是阿壩師專校園坐標記錄。
2.1 ADXL345程序
ATMEGA644P通過IIC總線訪問三軸加速度傳感器ADXL345,IIC總線是飛利浦公司推出的一種串行總線,是具備多主機系統所需的總線裁決和高低速器件同步功能的高性能串行總線。IIC總線由數據線SDA和時鐘線SCL組成。IIC總線的數據線上提供起始、停止、應答、非應答四種信號。在使用ADXL345測量加速度時,需要對電源寄存器、數據格式寄存器初始化,初始化完成后,方可測量x、y、z方向的加速度。電源寄存器不僅可以設定供電模式,而且配合BW_RATE寄存器,還可對數據速率進行設定,默認情況下是100 Hz。配置數據格式寄存器,可以設定SPI工作模式是三線制還是四線制、分辨率位數、量程、是否將自測應用到傳感器。以下是ADXL345初始化的主要代碼。
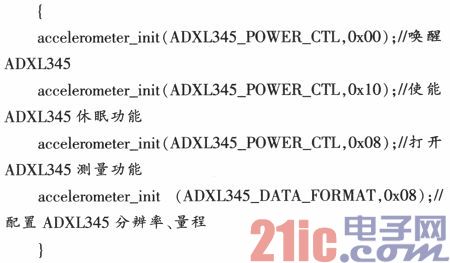
本題中將三軸加速度傳感器ADXL345的分辨率設置為13位,從寄存器DATAX0,DATAX1中讀出數值,將DATAX1中低5位數據和DATAX0的數據進行拼接,DATAX1的高3為作為符號位,就能實現X方向的加速度測量,Y軸、Z軸方向加速度讀取方法與X軸方向一致。
2.2 GPS接收程序
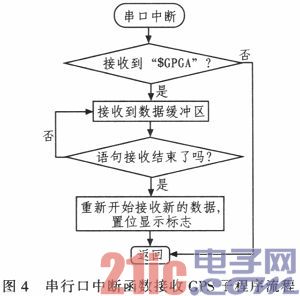
由于GPS板接收到的語句格式不只一條,所以要完整的接收到“$GPGGA*”數據,就必須對語句頭進行檢測,當接收的字符和這7個字符完全相同后,才能將數據進行存儲,當接收到“*”字符,表示該條語句接收結束,可以對數據進行處理。圖4所示是串行口中斷函數接收子程序流程。
2.3 主程序
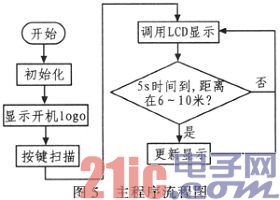
主程序的設計包括初始化相關寄存器、I/O端口、USART、IIC以及LCD1602液晶初始化,初始化完成之后顯示開機LOGO。在循環體中,先進行鍵盤掃描,以選擇目標點,ATMEGA644P控制器通過串口中斷接收GPS接收板發回的$GPGGA數據,以獲得當前的坐標,經過計算得到當前位置距離目標點距離及相對方向,通過LCD1602液晶顯示。然后每隔5秒,判斷是否需要采集當前的經緯度數據,通過公式(1)計算獲得最新數據信息,以便數據信息及時更新。圖5是主程序流程圖。
d=R*arccos(θ)*PI/180
其中θ=sin(LatA)*sin(LatB)+cos(LatA)*cos(LatB)*cos(LongA-LongB),(LatA,LongA)是A點的經緯度坐標,(LatB,LongB)是B點的經緯度坐標。經度按照東正西負來計,緯度按照北緯取90-緯度值,南緯取90+緯度值,地球半徑R為6 371 004 m,PI取值3.141 592 6。
3 測試結果
在阿壩師專校園試運行,接收當前位置信息時要確保接收到3顆及以上的衛星,使得GPS定位準確,所采集的經緯度數據有效,獲得較準確的距離。表2所示是實測距離結果是以行政樓作為當前位置。
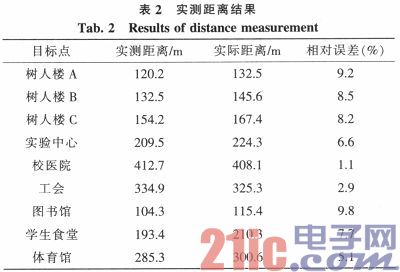
通過表2可以看出測量距離在500 m以內,相對誤差范圍控制在10%以內,達到了較高的精度。
4 結束語
文中設計了一種基于ATMEGA單片機的低功耗、低成本的跟蹤系統。主要闡述了整個系統的硬件設計原理、主要模塊電路設計及軟件設計流程,系統在戶外運行,通過實驗測得的數據誤差較小,能提供長達8h以上連續穩定工作,為用戶導航提供很大的幫助。



評論