基于紅外反射式智能循跡遙控小車系統設計

摘要:介紹了一種采用STC89C52、L298N和TCRT5000設計的智能循跡和紅外遙控的小車。智能循跡采用紅外傳感器檢測路面信息,傳遞給單片機自動分析處理,最后控制電機調節小車按預定軌道平穩行駛。紅外遙控部分是手動模式,單片機解碼遙控器發出的指令,控制電機操縱小車。液晶顯示模塊使操作更加簡單、智能、人性化。實踐表明,小車能夠準確實現沿黑線軌道平穩行駛和接收遙控器指令。
本文引用地址:http://www.czjhyjcfj.com/article/201610/307642.htm隨著城鎮化,軌道交通及智慧城市的深入推進,關于智能汽車的研究也就越來越受到各國政府的關注。全國電子大賽和省內電子大賽幾乎每次都有智能小車這方面的題目。全國各高校也都很重視該領域的研究。智能小車是指可以按照預先設定的模式在一定的環境里自動行駛。它集中地運用了微控制器、傳感器信息處理及自動控制等技術。可廣泛應用于科學勘探,工業控制和家用電器等領域。
1 硬件電路設計
1.1 整體設計
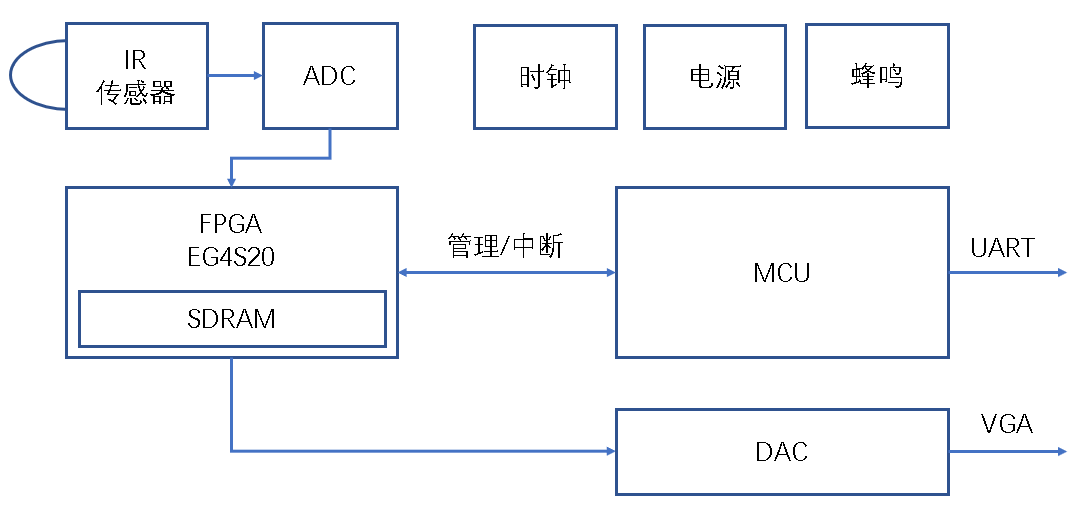
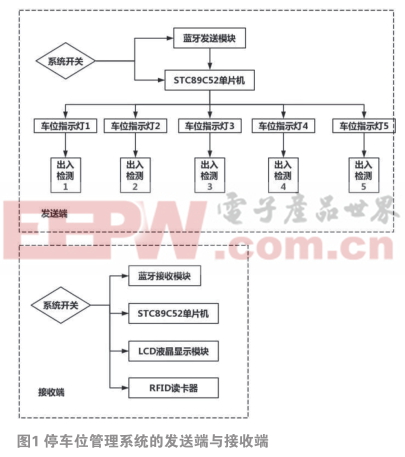
智能小車的整體結構由光敏傳感器模塊TCRT5000、微處理器模塊STC89C52、紅外遙控HX1838、輸出驅動模塊L298N、液晶1602顯示模塊及串口下載模塊構成如圖1所示。

智能循跡部分是基于紅外反射式光電傳感器的尋跡原理,采用STC89C52單片機為核心控制單元,控制步進電機調節小車按預定軌道平穩行駛。紅外遙控部分是手動模式,單片機解碼遙控器發出的指令,通過步進電機控制小車行進路線。
1.2 傳感器模塊設計
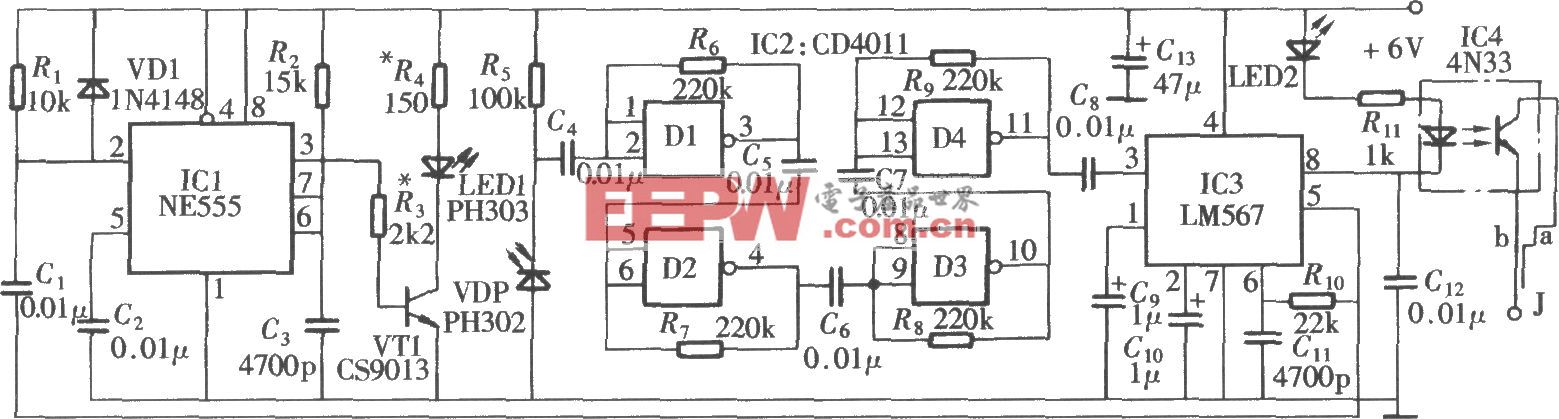
TCRT5000傳感器的紅外發射二極管不斷發射紅外線,當發射出的紅外線沒有被反射回來或反射回來但強度不夠大時,光敏三極管一直處于關斷狀態,比較器負端相當于接地,比較器輸出端為高電平,指示二極管被點亮;被檢測物體出現在檢測范圍內時,紅外線反射回來且強度足夠大,光敏三極管飽和,比較器負端為高電平,比較器輸出端為低電平,指示二極管一直處于熄滅狀態。傳感器模塊電路如圖2所示。
圖2中,采用了4個CTRT5000傳感器,運放LM423做比較器處理傳感器采集到的路面信息,并傳遞給單片機。可調電阻RV2可以調節比較器的門限電壓,使輸出波形可以直接夠單片機查詢使用。
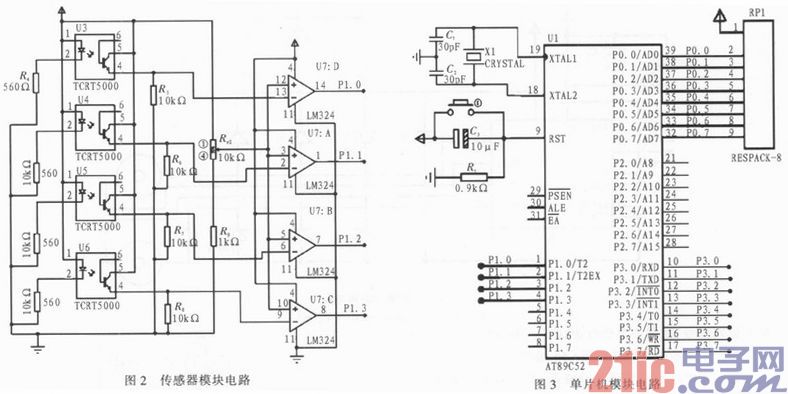
智能小車傳感器的布局方式有多種,這里采用一字型非均勻對稱布局。均勻排布型不利于對彎道信息采集的準確性。考慮到弧度信息采集的連貫性,非均勻排布采用等角原則,即在直線垂直上方處某點等角的引射線與直線的交點即傳感器的分布點,此種方法檢測連貫簡單,程序控制算法簡單,使小車控制穩定。
1.3 處理器模塊設計
微處理器完成對各個模塊的管理,實現對外圍模塊的信號發送,以及對傳感器模塊的信號采集,并根據軟件算法對所采集的信號進行處理,發送信號給步進電機執行模塊進行任務執行,還對各種突發事件進行監控和處理,保證整個系統的正常運作。這里采用STC89C52。該單片機是兼容8051內核的低電壓。STC89C52是一種低功耗、高性能CMOS8位微控制器。具有8k在系統可編程Flash存儲器。在單芯片上擁有靈巧的8位CPU和在系統可編程Flash使得STC89C52為眾多嵌入式控制應用系統提供高靈活、超有效的解決方案。具有以下標準功能:8k字節Flash 512字節RAM,32位I/O口線,看門狗定時器,內置4KB EEPROM,MAX810復位電路,3個16位定時器/計數器,一個6向量2級中斷結構,全雙工串行口。ISP(在系統可編程)/IAP(在應用可編程),無需專用編程器,如圖3所示。
單片機P3.3引腳負責接收紅外遙控HX1383指令,選擇工作模式(智能循跡模式或手動模式),P1.0~P1.3引腳采集傳感器數據,經單片機處理后由P0口輸出到液晶屏1602顯示。由于P0口內無上拉電阻,需在外面接上拉電阻。P3.4~P3.7引腳傳遞指令給電機驅動模塊,控制小車運行軌跡。
1.4 電機驅動模塊設計
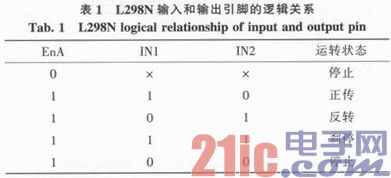
為提高系統效率、降低功耗,功放驅動電路采用基于雙極型H橋型脈寬調制方式(PWM)的集成電路L298N。L298N是SGS公司的產品,內部包含二個H橋的高電壓大電流橋式驅動器,接收標準TTL邏輯電平信號,可驅動46伏、2安培以下的電機,工作溫度范圍從-25度到130度。EnA和EnB是控制使能端,EnA控制OUT1和OUT2之間電機的停轉,由EnB控制OUT3和OUT4之間電機的停轉,根據IN3、IN4腳的輸入電平情況控制OUT3和OUT4之間電機的轉向。表1是其使能引腳,輸入引腳和輸出引腳之間的邏輯關系。
電機驅動模塊電路如圖4所示。
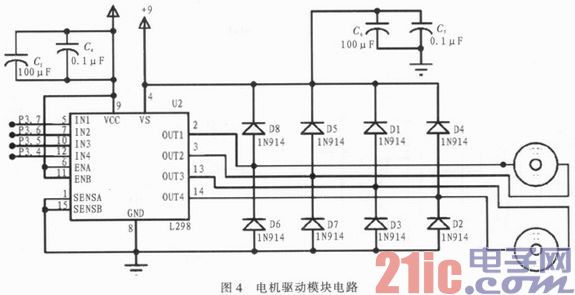
在硬件電路的連接上,單片機的P3.7~P3.4引腳分別接到L298N的IN1~IN4上,通過改變P3.7~P3.4引腳上的高低電平以控制小車的行進軌跡,通過改變P3.7~P3.4引腳上的高低電平占空比以控制電機的轉速。EnA和EnB接電源,使使能端有效。為保證L298N驅動芯片正常工作,還要在其與直流電機之間加入四對續流二極管用以將電機中反向電動勢產生的電流分流到地或電源正極,以免反向電動勢對L298N產生損害。電容C0和C7是濾波電容,減少外界干擾,使電機穩定工作。C4和C5是電源退耦電容。
1.5 顯示模塊和串口模塊設計
顯示模塊由液晶1602承擔,與單片機P0口相連。
串聯模塊采用芯片MAX232,把PC機程序數據下載到單片機中,完成數據轉換。
2 軟件設計
2.1 功能及算法分析
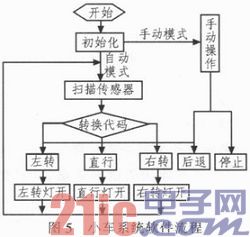
根據液晶屏顯示信息,選擇智能循跡模式,還是手動操作模式。若選擇智能循跡模式,單片機自動處理傳感器傳送的路面識別信號,控制小車的行走狀態。手動模式由紅外遙控器控制。小車系統的軟件使用C51編程。
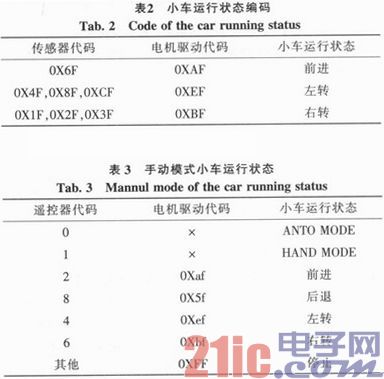
根據傳感器的電平信息進行編碼,單片機根據編碼可將小車運行狀態分為3種情況,見表2。控制電機的電平信號由單片機P3口高四位輸出到L298N,進行電機驅動控制。
手動模式小車運行狀態見表3。
2.2 系統程序設計
系統的程序由延時程序、電機動作控制程序、傳感器掃描程序和主程序構成,篇幅限制,需要程序可發郵件。程序流程圖如圖5所示。
3 結束語
論文采用STC89C52、L298N和TCRT5000實現了智能循跡和紅外遙控小車的設計。以紅外反射式光電傳感器的尋跡原理,采用STC89C52單片機為核心控制單元,控制步進電機調節小車按預定軌道平穩行駛。實踐表明,該系統抗干擾能力強,電路結構簡單,能夠準確實現小車沿給定的黑線快速平穩行駛和手動遙控操作。顯示模塊的設計,操作更加簡單、智能、人性化。






評論