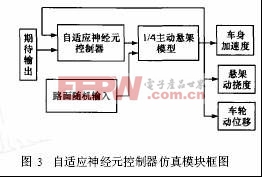
汽車主動懸架的單神經(jīng)元自適應(yīng)控制

所用的懸架模型參數(shù)名義值[10>
ms=240kg,mt=36kg,ks=16kN/m,b=980N?s/m,kt=160kN/m。以C級路面的垂直速度為激勵輸入進(jìn)行仿真。路面不平度系數(shù)Gq(n0)=256×10-6m2/m-1,車速v=20m/s,參考空間頻率n0=0.1m-1,速度功率譜密度為一白噪聲Gq?(f)=4π2Gq(n0)n20v。仿真中神經(jīng)元控制器參數(shù)為:學(xué)習(xí)速率d1=30,d2=63.3,d3=15.9;比例系數(shù)k=148.7;采樣周期為0.01s。本文引用地址:http://www.czjhyjcfj.com/article/197811.htm
仿真時,先對模型參數(shù)取名義值進(jìn)行驗證;然后將懸架參數(shù)的車身質(zhì)量增加20%,同時輪胎剛度下降20%,考察控制器在模型參數(shù)變化時的適應(yīng)能力。以上兩種情況著重考察車身加速度響應(yīng),見圖4及圖5;根據(jù)懸架系統(tǒng)時域輸出仿真數(shù)據(jù),計算車身加速度、懸架動撓度、車輪動位移的均方根值及綜合性能指數(shù)J,如表1所示。
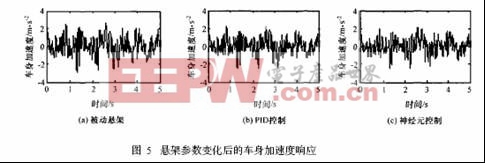

由圖4和表1可知,在名義參數(shù)情況下,兩種主動懸架都能有效地降低車身加速度,改善平順性。盡管懸架動撓度有所增大,但車輛的綜合性能仍得到了改進(jìn)。而且,自適應(yīng)神經(jīng)元控制下的車輪動位移也有一定程度的改善,其綜合減振效果要明顯優(yōu)于PID控制。由圖5和表1可見,在懸架參數(shù)變化時,兩種主動懸架仍然都能減少車身加速度,有效地改善平順性。自適應(yīng)神經(jīng)元控制的減振效果仍然優(yōu)于PID控制。由此表明:自適應(yīng)神經(jīng)元控制能有效地跟隨模型參數(shù)的變化,將車身加速度控制在一個較好的范圍內(nèi),降低了參數(shù)不確定性對車輛平順性能的影響;雖然神經(jīng)元控制的懸架動撓度、車輪動位移相對被動懸架有所增大,但相對PID控制仍有改善,尤其是其綜合性能也得到了改進(jìn)。
五、結(jié)論
(1)車輛主動懸架的自適應(yīng)神經(jīng)元控制器的仿真結(jié)果表明:該控制器能有效地改善車輛的綜合性能,尤其是車輛運行的平順性和舒適性,而且魯棒性好,對模型參數(shù)的變化具有一定的適應(yīng)性,便于實現(xiàn)和應(yīng)用。
(2)需要進(jìn)一步研究控制器對不同路面激勵的適應(yīng)性,以完善主動懸架的性能。
(3)應(yīng)對控制過程的實用化作深一步的研究,比如考慮作動器的非線性、時滯等因素的影響。










評論