基于FPGA的高速運動目標單光幕測速系統設計

引 言
高速運動物體的物理狀態檢測分析一直以來都是一項重要的研究內容,特別是對于高速運動物體瞬時運動速度的檢測。這是瞬態過程及效應物理研究中的一個有待發展的領域,可能會導致極端條件下的新物理效應,在高速碰撞等方面有著直接的應用背景,也給檢測和控制技術提出了更高的挑戰。
1 測量方法
對于高速運動的物體,常用的速度測量方法按測量原理可分成三類,即瞬時速度測量法、平均速度測量法和多普勒原理測量法。瞬時速度測量法采用彈道擺或微波傾角法,可以換算出物體的瞬時飛行速度,但測試誤差較大,目前很難達到高的精度。多普勒測速法是利用波傳播中多普勒效應進行測速的方法,也是一種比較有效的測量速度方法。平均速度測量法是在測量目標前進方向放置兩道光幕;通過測量兩光幕之間的距離S和測量目標通過兩光幕之間的時間t;然后利用平均速度公式v=S/t計算測量目標的速度,如圖1所示。
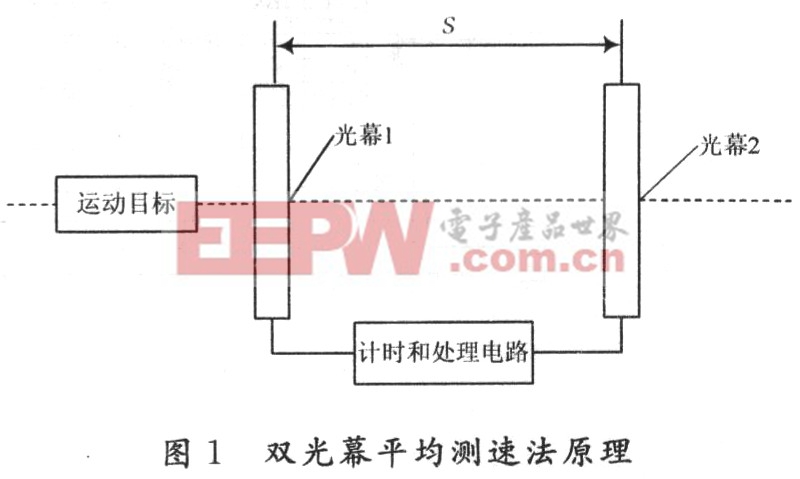
但在使用雙光幕的平均速度測量法中,由于每個光幕及其后處理電路在工作中的處理速度和延時不可能完全一致,這樣就會造成難以避免的誤差。在要求高精度的測量中,這些誤差會對結果產生附加的負面的影響。另外,兩個光幕射出的光要求嚴格平行,否則測量結果也會產生誤差,而嚴格平行在現實測量中也很難做到。基于此,這里提出一種單光幕的速度測量系統。在避免兩路信號通過光幕及其后的電路時由于處理時間不一致而在產生誤差的同時,也避免了因兩束光線不平行產生的誤差。
2 測量系統原理
該系統采用單光頭測量,系統總體結構如圖2所示。將光源置于發射器出口處的上方,并在其下方固定光敏器件,使光敏器件可以準確接收到光源所發出的光束。測量開始后,當目標前端擋住光源發出的光時,光敏器件因接收不到光而輸出低電壓信號;當目標通過后,光敏器件重新接收到光源所發出的光后,輸出變回高電壓信號。被測目標的長度L可以事先通過矩陣鍵盤輸入到測速度系統,根據電信號的變化觸發和停止計數單元,可以記錄到目標通過光源下方的時間t,在假設目標運動方向與光束垂直時,可近似取L計算目標在這段時間內的平均速度v=L/t。此時,目標不受運動方向上力的作用,所以速度變化微小,此速度可看作目標的出口速度。










評論