基于線陣CCD掃描的測量技術

3 圖像處理算法
通過以上分析,對系統的運動工作臺的行進速度進行嚴格控制,使之與CCD相機的掃描速度達到很好的同步效果,實際采集零件圖像如圖3所示。本文引用地址:http://www.czjhyjcfj.com/article/195610.htm

3.1 圖像邊緣提取
由于需布置光源,而光源隨時間會有所衰減。所以對圖像采用邊緣檢測的算法,以減小光源亮度變化對圖像檢測的影響。要得到圖像的輪廓尺寸,邊緣檢測是測量的基礎和關鍵。由于圖像往往含有噪聲。而邊緣和噪聲在空間域都表現為灰度有較大的起落,給邊緣提取帶來困難。通過仿真比較,最終采用了3*3的平滑算子和抗噪能力較強的sobel檢測算子,它對灰度漸變和噪聲較多的圖像處理效果較好,對邊緣定位比較準確,能夠滿足我們對圖像測量的需要。由sobel算子提取被測零件的圖像邊緣如圖4(a)所示,圖像邊緣是一條細環,由于圖像太大,顯示圖為33%的縮略圖,看起來間斷的地方很多,其實是連續的,大部分邊是單像素寬,左下角部分400%的顯示圖如圖4(b)所示。
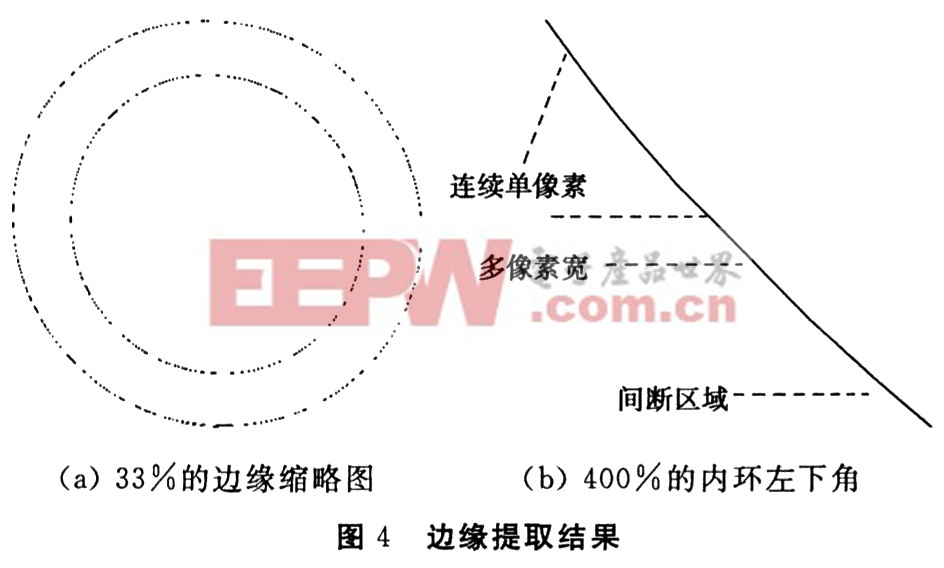
在圖4(b)中,有些地方不是單像素寬,會影響輪廓鏈接成一條鏈。由于有斷點的存在,為了不增加斷點的間隙,采用保留端點的細化方法,生成單像素寬的環,以得到準確的周長;由于噪聲的影響,有些地方還有間斷,缺口只有一兩個像素的距離,對于大于一定長度的邊緣段,根據各條邊緣段起始點或終止點之間的距離d,判斷它們之間的可連接性及需要連接的像索個數及與前一個像素的位置關系,進行像素的最少個數插值,并由位置關系確定插值像素對周長的貢獻。當 像素時插入一個像素;當
像素時插入一個像素;當 像素時,插入兩個像素,從而得到連續的單邊緣輪廓。
像素時,插入兩個像素,從而得到連續的單邊緣輪廓。
3.2 周長法計算直徑
計算區域的直徑有很多方法,對于標準圓形,可以采用霍夫變換或最小二乘擬合等方法。但對于非標準圓形零件,需要計算它相對于圓形的直徑,根據周長不變的特性,采用周長法計算直徑。對得到的連續單邊緣輪廓用鏈碼表示,假設像素點邊長為1個單位長度。
(1)當前像素點位置與前一像素點位置為水平關系或垂直關系時(左、右關系或上、下關系),適合于用像素的一倍邊長![]() 近似;
近似;
(2)當前像素點位置與前一像素點位置為傾斜關系時,適合于用像素的倍邊長近似;



評論