基于CAN總線的數據采集與控制系統設計

摘要:為了保證數據傳輸的實時性、可靠性,解決數據傳輸過程中易受干擾的問題,并保證數據采集和控制系統的性能,采用CAN總線作為現場總線來實現數據傳輸。經過對系統軟硬件在不同環境下的多次測試,驗證了該系統的性能,同時也體現了CAN總線在通信能力、可靠性和實時性等方面的明顯優勢。
關鍵詞:CAN總線;數據采集;控制系統;串行通信
0 引言
隨著計算機網絡上的高速發展,使得信息的交流與共享變得空前廣泛和自如,而這項技術也滲入到自動化領域的變革當中,現場總線(Fieldbus)由此應運而生,開創了工業控制的新篇章。現場總線是一種應用于生產現場,在現場設備之間、現場設備和控制裝置之間實行雙向、串形、多結點的數字通信技術,在當今自動化領域中具有廣闊的發展前景。本文給出了一種基于CAN總線的數據采集與控制系統設計方案,實現對開關量的數據采集和對外部設備的控制功能。
控制器局域網(Controller Area Network,CAN)總線是現場總線的一種,是一種有效支持分布式控制或實時控制的串行網絡通信,已經被廣泛地應用于工業自動化、船舶、醫療設備、工業設備等方面,并被公認為最有前途的現場總線之一,其主要特點如下:
(1)CAN是有國際標準的現場總線。
(2)CAN為多主工作方式,網絡上的任意一節點都可在任意時刻向網絡上的其他節點發送信息,且不分主從。
(3)CAN采用非破壞總線仲裁技術。當多個節點同時向總線發送信息出現沖突時,優先級低的節點將主動退出發送,而優先級高的節點不受影響繼續發送。
(4)CAN節點在錯誤嚴重的情況下具有自動關閉輸出功能,使總線上其他節點的操作不受影響。
(5)報文采用短幀結構,傳輸時間短,受干擾概率低,而且每幀都有CRC校驗及其他校驗措施,具有極好的檢錯效果。
(6)CAN的直接最遠通信距離可達10 km,最高通信速率可達1 Mb/s。
1 系統總體結構設計
系統主要由上位機(PC機)和數據采集和控制模塊組成。系統總體結構設計如圖1所示。

上位機是整個系統的核心,實現系統的監控和管理功能。CAN總線智能適配卡的作用是收集各個CAN節點上的數據,然后轉發到上位機,同時把上位機的命令轉發到各個節點。由于CAN總線特有的多主傳輸方式,各個節點根據需要自主地向總線發送數據,而且在上位機監聽各個節點的同時,節點也實時監聽總線并接收自己需要的數據。數據采集和控制模塊采用微處理器和可編程的CAN控制芯片,主要用于完成現場數據的采集、數據的傳送以及各個現場設備運行的控制。
2 數據采集和控制模塊硬件設計
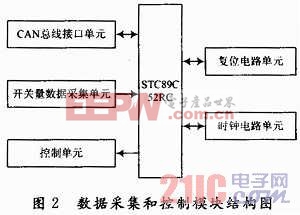
基于CAN總線的數據采集與控制系統將功能盡可能地分散到各個控制模塊中,各個模塊以微處理器為核心,完成數據采集和控制功能。為了使信息能在CAN協議的標準下進行通信,各個模塊都設有CAN總線接口電路。該模塊的微處理器(MCU)選用宏晶科技的STC89C52RC單片機。STC89C52RC是新一代超強抗干擾、高速、低功耗的8位單片機,指令代碼完全兼容傳統的8051單片機,36個通用I/O口,3個16位定時器/計數器,4路外部中斷。根據實際需求分析,STC89C52RC單片機完全滿足本設計的需求。數據采集和控制模塊的結構如圖2所示。











評論