基于示波器的調制系統時延測量

摘要:導航、雷達、應答、授時、航天測控等領域需要測量發射、接收裝置本身的時延。調制系統是置中的重要組成部分。本文介紹了基于示波器的調制系統時延測量方法。借助現代高帶寬、高采樣率存儲示波器,可以自動完成被測系統輸入輸出信號的采集、處理和測量。
本文引用地址:http://www.czjhyjcfj.com/article/192778.htm關鍵詞:調制;時延測量;示波器;電纜去嵌;包絡檢波;參數追蹤;希爾伯特變化;LabMaster
一.引言
在導航、雷達、應答、授時、航天測控等領域,通過解析發射和接收信號的時間和相位關系來獲的距離或速度。用于測距、測速的無線電波不僅在空間傳播有時延,在發射和接收裝置中傳輸、處理間延遲。發射、接收裝置的核心部分是調制解調系統,準確測量調制系統的時延,并消除其在整個系入的誤差,是提高測距、測速精度的前提。
時延的測量方法可以概括為時域測量和頻域測量兩大類。
頻域測量是用矢量網絡分析儀測出設備的相位-頻率特性,即S21的相位曲線,再對相頻曲線微分到設備的群時延。這種測量方法適用于線性元器件,而不適合變頻器件。雖然也存在三混頻器法、雙方法來解決變頻器件的群時延測量,但這些方法無法解決混頻器非互易性的問題。
時域測量一般是用時間間隔測量儀或示波器直接對設備輸入和輸出的信號進行測量。時間間隔測量儀只能測量波形簡單的信號,如脈沖。而示波器能夠直接采集、測量波形復雜的信號,適用性更廣。
現代數字存儲示波器可以實現帶寬65GHz、采樣率160GSa/s的高速采樣,時間分辨率極高,并且可以對采樣后的波形數據直接進行數字變頻、濾波、解調、互相關等各種信號處理,因此用數字示波器可以方便地測量調制系統的時延。本文以型號為LeCory LabMaster 10-65Zi的示波器為例,詳細闡述調制系統時延的測量、校準方法,并分析測量的不確定度。
二.測試框圖和校準方法
圖 1是示波器測量設備時延的連接框圖。一激勵信號源通過功分器輸出兩路信號,一路輸入到被測設備,一路輸入到示波器的一個通道。被測設備輸出的信號接到示波器的另外一個通道。

這種連接方式使用的三條同軸電纜#1~#3以及功分器會引入誤差。在測量之前需要校準。電纜#1和電纜#2,以及功分器兩個輸出端口傳輸的是同一信號,信號傳播速度是一致的,因此可以采用交換法消除電纜#1和#2以及功分器的延遲差異。功分器兩路輸出端口可以看作分別和電纜#1和#2是一體的。假設三條電纜的時延分別為T1, T2, T3,被測設備的時延為T0。
先用示波器測量輸入的兩個信號時延,結果計為Tm1,則滿足:
Tm1 T1 T0 T3 T2
將電纜#1和#2互換,即電纜#2接到被測設備,電纜#1接到示波器,但不改變它們和功分器的連接。時延測量結果計為Tm2,則滿足:
Tm2 T2 T0 T3 T1
兩式相加能夠去掉電纜#1和#2的影響:
T0 T3 (Tm1 Tm2)/2
為了消除電纜#3引入的時延,使用LeCroy示波器內置的電纜去嵌功能,根據電纜的S參數去掉電纜引入的時延。這樣示波器測量值已經是消除了T3的結果。
還有一個時延誤差來源是示波器兩個通道之間的時延差異,這可利用示波器自帶的快沿信號來校準,校
準后的時延測量值自動消除了通道間的延遲差異。
三.時延測量方法
圖 2是一個FSK基帶信號和射頻信號的時延測量示意。利用示波器測量設備時延的難度在于,被測設備的輸入和輸出信號不在同一個頻段,有可能分別是基帶、中頻或者射頻域。實際用示波器采集到的信號不會像圖 2這樣容易地分辨出頻率、相位的變化位置,必須對波形數據進行處理后才能測量。
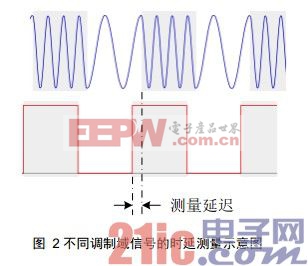
LeCroy示波器內置了多種數字信號處理算法和自動測量功能,可以直接在示波器上自動完成信號的采集、處理、測量。
根據信號處理的特點,時延測量具體可分為以下幾種。
1.包絡檢波法
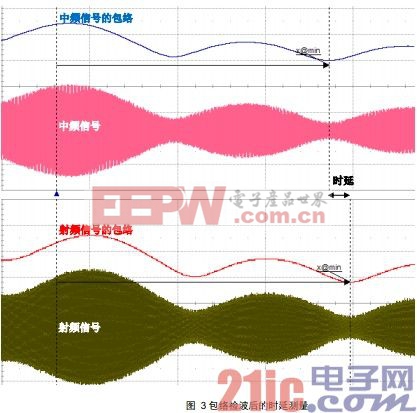
PSK,QAM這類相位變化的數字調制信號,由于脈沖成形濾波器的緣故,其相位翻轉時刻就是調制信號功率極小值的時刻。因此可以利用LeCroy示波器的解調運算得到信號的包絡,包絡極小值的水平位置就是相位翻轉時刻。圖 3是一個16QAM中頻信號和射頻信號時延測量的例子。對兩個信號都進行幅度解調后,得到各自的包絡信號。再利用示波器自動測量兩個包絡極小值的間隔時間,就得到中頻和射頻信號的時延。
2.參數追蹤法
可以利用示波器測量調制信號每個周期的頻率、相位或幅度等參數,再利用示波器內置的測量參數追蹤功能,畫出參數隨時間變化的曲線。圖 4是一個對信號頻率參數追蹤的示意。上面的波形是一個掃頻信號,下面的波形是掃頻信號的頻率參數追蹤曲線。
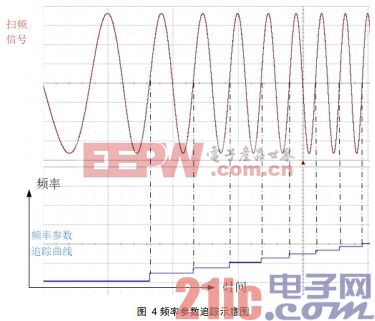
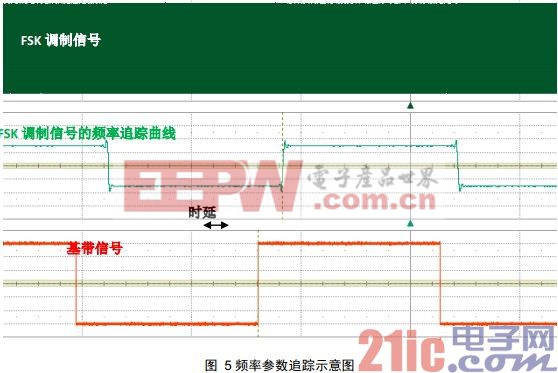
圖 5是利用參數追蹤功能測量FSK基帶信號和調制信號時延的結果。上方的波形是示波器采集的射頻調制信號,中間的波形是對射頻信號每個周期的頻率進行參數追蹤的曲線,它直觀地反映了射頻信號的頻率切換過程。將其和實際測量的基帶信號比較,就能測量出基帶和射頻信號的時延。

接地電阻相關文章:接地電阻測試方法
c++相關文章:c++教程
功分器相關文章:功分器原理








評論