基于FPGA的提取位同步時(shí)鐘DPLL設(shè)計(jì)

異或鑒相器的輸出為:
q(n)=q(n-1)+p(n) (2)
由上可得出反饋信號(hào)周期與輸入信號(hào)周期的差分方程:
to(n)=ts(n-1)+q(n-1)+ε{u(n-1)?[ts(n-1)-ts(n-2)]} (3)
式中:ε[?]是由于相位差引入的一個(gè)二階量,當(dāng)p(n)很小時(shí),ε[?]是一個(gè)無窮小的量。在p(0)=O,q(O)==0,ε[?]=0的情況下,對(duì)式(3)進(jìn)行z變換得:

其特征方程為:

解得:
z1,2=0.5±0.5i,z3=0
由于|z1,2|=0.7071,|z3|=0
由此可知,系統(tǒng)穩(wěn)定。接下來討論系統(tǒng)對(duì)輸入信號(hào)的跟蹤誤差:
式中:b>0,當(dāng)|b|/|a|足夠小時(shí),對(duì)上式做單邊z變換,利用中值定理得:

由此可見,穩(wěn)態(tài)誤差取決于輸入信號(hào)與本地信號(hào)初始相位誤差。由于系統(tǒng)最后穩(wěn)定在120 ns內(nèi),而每個(gè)待鎖定碼元的寬度是2 000 ns,使用△表示鎖定后的最大誤差范圍,可得:

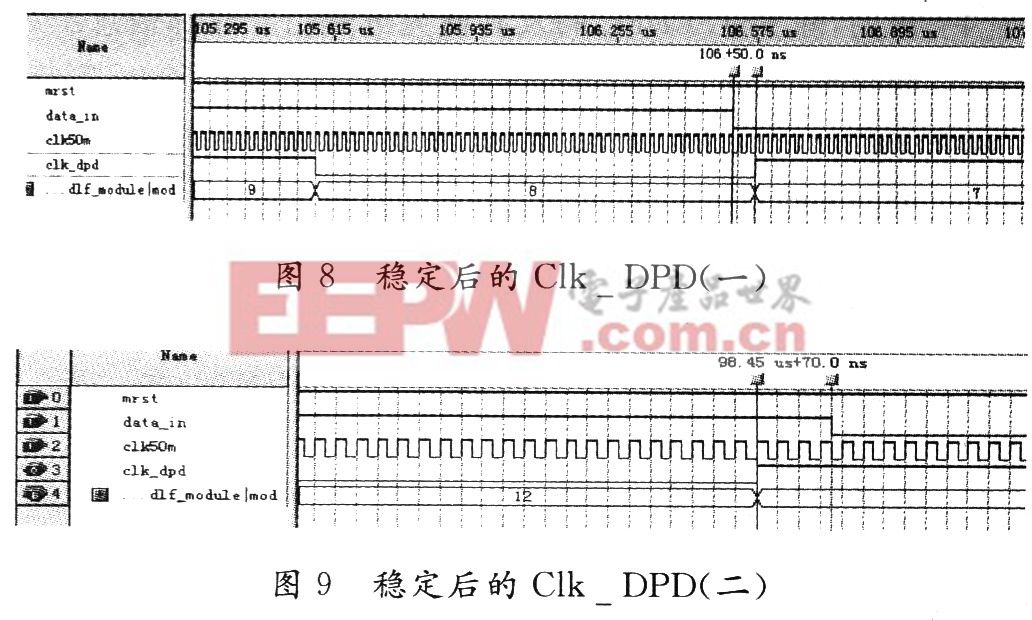
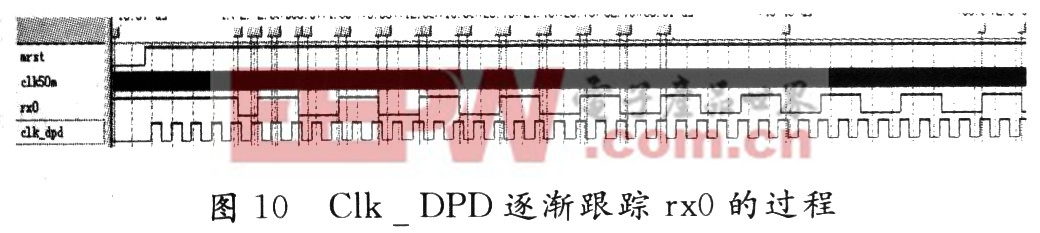
可見,穩(wěn)定后,偏移量△最多不超過6%。所以120 ns的穩(wěn)態(tài)誤差能滿足需要,系統(tǒng)可根據(jù)DPLL輸出周期為2μs的同步位時(shí)鐘下降沿可靠采樣,避免了亞穩(wěn)態(tài)現(xiàn)象的發(fā)生。穩(wěn)定后的Clk_DPD如圖8、圖9所示,滯后50ns,累計(jì)4次后,超前70ns,穩(wěn)定于絕對(duì)誤差120ns。Clk_DPD逐漸跟蹤rx0提取出其中隱含的位時(shí)鐘的過程如圖10所示。
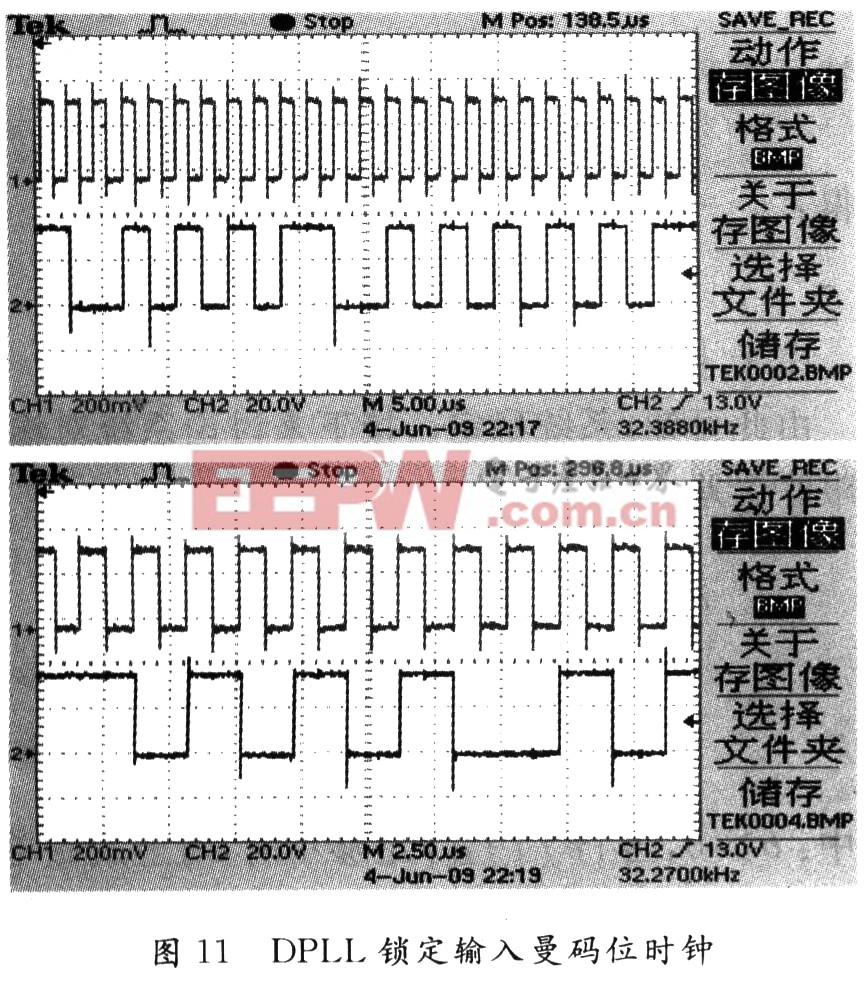
示波器撲捉到DPLL鎖定輸入的曼徹斯特碼位時(shí)鐘的波形如圖11所示。
4 結(jié) 語
本文主要研究了一種基于FPGA、自頂向下、模塊化、用于提取位同步時(shí)鐘的全數(shù)字鎖相環(huán)設(shè)計(jì)方法。應(yīng)用Verilog硬件描述語言使設(shè)計(jì)更加靈活,不僅縮短了設(shè)計(jì)周期,而且可實(shí)現(xiàn)復(fù)雜的數(shù)字電路系統(tǒng)。本文測(cè)試中所用的待鎖定輸人數(shù)據(jù)由AM7960芯片輸出的曼徹斯特碼提供,通信速率為250 Kb/s,經(jīng)由MAx3485轉(zhuǎn)換成LVTTL電平信號(hào),輸入FPGA芯片EPlC3T10017。由于曼徹斯特碼在每個(gè)碼元內(nèi)有一次跳變,鎖定后的時(shí)鐘是500 Kb/s。經(jīng)仿真測(cè)試,該DPLL具有鎖定相位時(shí)間短,鎖定后相位穩(wěn)定的特點(diǎn),最大偏差不超過6%,這在理論上已加以證明,從而驗(yàn)證了設(shè)汁的正確性。

數(shù)字通信相關(guān)文章:數(shù)字通信原理
鑒相器相關(guān)文章:鑒相器原理











評(píng)論