一種數字跟蹤測距模塊的設計與實現

雷達最主要的功能之一就是對目標距離的跟蹤和測量。在此首先闡述了雷達測距跟蹤的基本原理,介紹一種脈沖雷達數字跟蹤測距模塊的設計及實現的新方法,并且敘述了該模塊研制的理論基礎。該模塊利用回波信號相對于發射脈沖的延遲時間量進行目標距離的測量,針對跟蹤脈沖的特點,對目標回波延遲時間計數值和跟蹤脈沖計數值進行比較,利用數字信號處理的方法把比較的結果反饋到跟蹤控制器,實現了脈沖雷達的距離跟蹤,具有測距精度高、測距穩定、抗干擾能力強及電路簡便等優點。該模塊能夠對目標進行手動跟蹤測距和自動跟蹤測距。
1 該模塊的理論設計
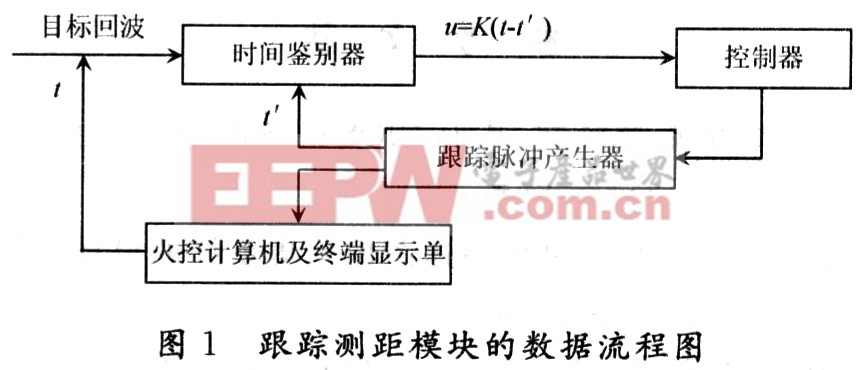
一般雷達數字跟蹤是通過時間鑒別器鑒別出回波信號與跟蹤脈沖之間的遲延時間差,然后利用時鐘脈沖對這個時間差進行計數,作為距離誤差反饋至跟蹤處理單元,其本質上是把模擬系統輸出量進行數字變換,即在模擬量的基礎上變換的,實質上還是模擬量(如圖1所示)。變換之間又有不可避免的系統誤差存在,例如要對跟蹤脈沖計時計數,而計時計數的起始時間必須要和雷達發射脈沖同步,要做到完全同步是很難的,這之間的誤差在所難免。又如某型雷達時間鑒別器中回波信號與跟蹤脈沖之間的時間差要轉化為帶有極性的電壓(存在誤差),然后又要將此電壓轉化為距離計數器的計數脈沖(也存在誤差),使距離計數器做加或減計數,實現對目標的距離跟蹤。
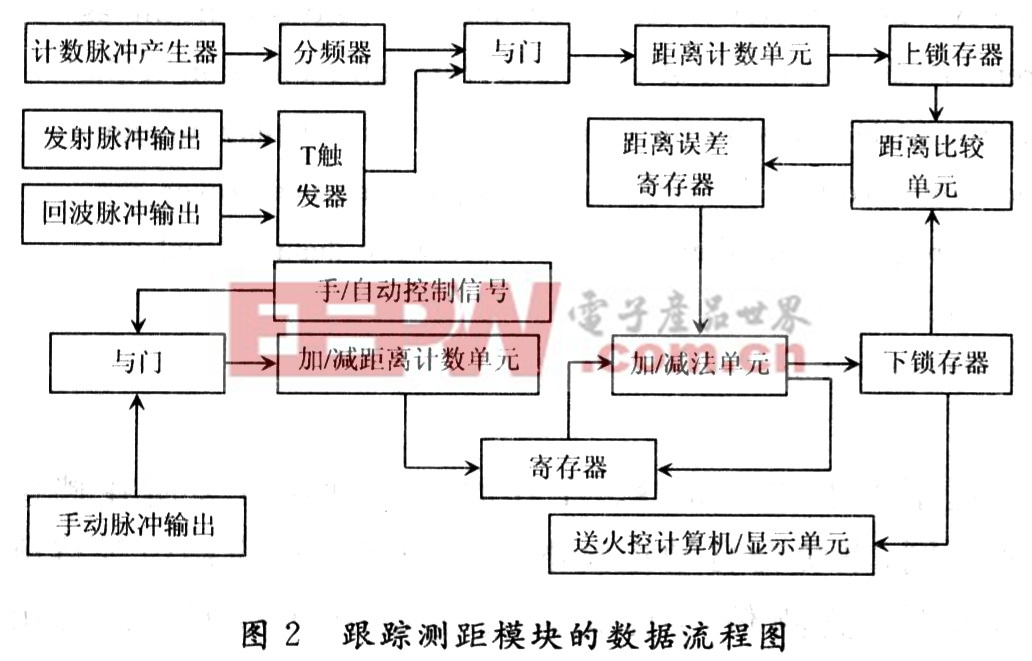
該模塊只需知道目標回波的二進制距離數值,然后與跟蹤脈沖的二進制數值進行比較,形成距離誤差作為反饋至距離產生器進行跟蹤處理即可,不需要對跟蹤脈沖進行專門的時間測量,也不必對回波信號和跟蹤脈沖間的時間差進行比較,簡化了電路構成、減少了系統誤差。在雷達全程探測完畢時,由計數停止脈沖將控制距離計數器和鎖存器清零。計數停止脈沖可以由下一個發射脈沖的前沿產生,也可由火控計算機提供。圖2是利用以上理論而設計的該跟蹤測距模塊的數據流程圖,該模塊利用數字技術可以實現距離數據的自動跟蹤。把目標的時延變成數字量,最基本的辦法就是利用計數器,并加以適當的控制。當雷達發射脈沖信號時,就觸發T觸發器,這樣同時啟動了計數器工作,一旦確定接收到了目標回波,就再一次觸發T觸發器使其停止計數器計數,這樣就在回波到達的時刻讀出計數器輸出的數據,即得到目標距離數據,通過與手動測距計數器輸出的數值進行比較,就得到距離誤差值,送至控制器進行跟蹤處理。手動與自動跟蹤測距的轉換是通過一個與門進行切換的。很明顯,該模塊的控制器和跟蹤脈沖產生器已經不是圖1所示意義上的控制器和跟蹤脈沖產生器。這時的控制器和跟蹤脈沖產生器已經融合在一起(在此仍用傳統的三部分來區分整個跟蹤測距模塊,但意義有所不同)。該模塊的優點就是結構簡單、易于理解且通用性比較強。不僅可以用在雷達整個跟蹤系統當中,也可以用在通用雷達訓練器的目標回波產生器和跟蹤測距訓練器上。

評論