基于NCOIPcore的Chirp函數實現設計

引 言
本文引用地址:http://www.czjhyjcfj.com/article/187614.htmIP就是知識產權核或者知識產權模塊的意思。在EDA技術和開發領域具有十分重要的作用,在半導體產業中IP定義為用于ASIC或FPGA/CPLD中預先設計好的電路功能模塊。IP可以分為軟IP,固IP和硬IP三種。
隨著電子系統的越來越復雜,PLD設計的越來越龐大,這就增加了市場對IP核的需求,各大FPGA/CPLD廠商陸續推出了許多IP核。例如:FIR(有限沖擊響應)數字濾波器core;FFT(快速傅里葉變換)core,NCO(數控振蕩器)core等,在設計中如果使用了這些知識產權核可以大大簡化 FPGA/CPLD的設計,加速設計速度,縮短研發周期,并且較之于開發者自己的設計程序,這些IP有更好的運算精度、速度、SFDR參數、SNR參數等,達到良好的效果!
由于電磁波在傳輸過程中,經過色散介質,如不均勻的波導經過高空電離層時會發生色散現象。Chirp函數在射電天文信號的消色散處理中發揮著重要的作用,研究在FPGA中實現Chirp函數是基于FPGA的射電宇宙信號處理的重要組成部分。如圖1所示。
該設計就是通過實時的改變NCO IP core的輸入頻率控制字的辦法,數控頻率輸出的辦法實現Chirp函數。
1 系統總體設計
Chirp函數根據輸出頻率的遞變規律一般分為兩種:線性Chirp函數和非線性Chirp函數,以下是兩種Chirp函數在頻域上的表現如圖2,圖3所示。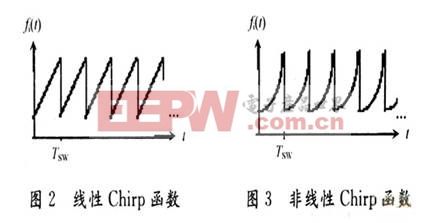
從圖2,圖3可以看出Chirp函數的頻率輸出與時間的f-t關系可以總結為:
對于線性Chirp函數:
在連續域時間域內有關系式:
式中:k為常數;f0為初始輸出頻率;t為連續時間。
在離散時間域有關系式:
式中:k為常數;f0為初始輸出頻率;n為采樣點。
對于非線性Chirp函數:在連續域時間域內有關系式:
式中:f(t)為非線性函數;f0為初始輸出頻率;t為連續時間。
在離散時間域有關系式:
式中:f(n)為非線性函數f0為初始輸出頻率;n為采樣點。由上式可以看出Chirp函數在每一個時刻點具有不同的頻率輸出,而根據具體的頻率變化的需要在每一個時刻點實時的改變其頻率控制字是實現Chirp函數的關鍵。其算法框圖如圖4所示。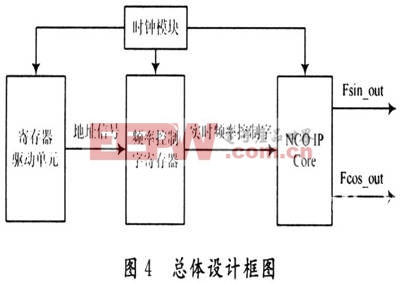
2 NCO IP Core
數字壓控振蕩器知識產權核(Numerically Con-trolled Oscillators Intellectual Property Core,NCO IPCore),通過多種算法(相位累加或者CORDIC算法,在此不一一贅述),實現了一個離散幅度和時間的正弦波信號輸出。輸入控制字和輸出頻率之間滿足以下方程:
s(nT)=Asin[2π(f0+fFM)nT+ψPM+ψDITH)] (5)
式中:T為該模塊的工作時鐘;f0是由輸入頻率控制字ψINC決定的初始頻率;fFM是由調制頻率控制字ψFM決定的調制頻率;ψPM為該輸出正弦波的調制相位,ψPM=P/2Pwidth,由輸入控制字P的比特位數(Pwidth)決定了它的精度;ψDITH為模塊內部自身的不穩定而引起的相位雜散(噪聲);幅值量A=2N-1,其中N為幅值精度取值在4~32之間。
該設計中僅采用通過改變頻率控制字ψINC,以實現改變頻率輸出的目的,為此式(5)可以簡化為:
式中,f0由給定的頻率控制字ψINC決定,滿足如下方程:
式中:M為累加器精度;fclk為該模塊的輸入時鐘頻率,單位為Hz。例如:在fclk=100 MHz的情況下,如果需要f0=10 MHz的輸出,ψINC的計算如下:
通過Altera公司的FPGA編程軟件QuartusⅡ提供的MegaWizard Plug-In Manager功能,在NCO IPCore參數配置中自動對ψINC的計算,很容易得出在輸入頻率的條件下所需輸出頻率的ψINC(累加器精度為32 b的情況下)如圖6所示。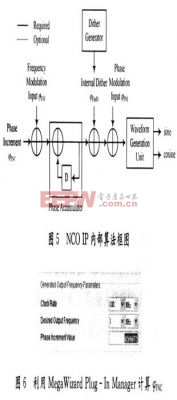
值得注意的是:在MegaWizard Plug-In Manage中,ψINC的精度只保留到了百位。 function ImgZoom(Id)//重新設置圖片大小 防止撐破表格 { var w = $(Id).width; var m = 650; if(w
3 頻率控制字寄存器及驅動單元的設計
頻率控制字寄存器為一個保存有N個輸出頻率所需的相位累加控制字的片上ROM單元,其作用在驅動單元輸入地址控制字的作用下實時向NCOIP Core調入所需要的ψINC,在該設計中Chirp函數的頻率變化規律是從1 MHz步進1 MHz輸出到16 MHz。在該設計中選擇的累加器精度為32 b,為此選擇的邏輯單元的規律為如表1所示。
為此,建立一個深度為1 6,每個存儲單元字長32 b位的ROM,將表1內所有ψINC數據保存至NCO_1_16.mif文件中,在ROM建立時調用該mif文件。如圖7所示。


評論