多學科間數據交互在SIMPACK中的實現

隨著工程技術應用復雜度及深度的拓展,以及交叉性學科的發展。各學科、各模型之間的數據交換實現問題,已經引起業內越來越多關注。而多體動力學軟件-SIMPACK在解決多學科與各種模型數據交換時具有自己獨特優勢,提供了多種實現方式,且獨有的代碼輸出功能,在實現靈活數據交互中是一亮點。目前版本的SIMPACK提供了包括代碼輸出,硬件在回路(HIL),以及軟件在回路(matlab)等多種數據交互方式。
本文引用地址:http://www.czjhyjcfj.com/article/187480.htm硬件數據交互方式介紹
SIMPACK在硬件數據交互方面提供了多接種口,實現模式一般如圖1所示。

圖1
實現原理一般是利用多體動力學SIMPACK軟件建立仿真數學模型,通過硬件接口,把仿真數據傳輸到硬件中,硬件通過對數據處理,把處理后的數據返回給SIMPACK,從而實現硬件在回路實時仿真功能,而SIMPACK8903版本已支持包括DSPACE、ETAS、xPC、VxWorks等多種國際主流實時仿真硬件。
軟件數據交互方式介紹
SIMPACK在軟件數據交互方面也提供了多種方式,其中與MATLAB交互方式如圖2所示。
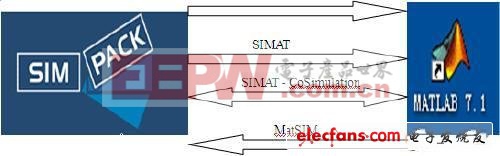
圖2 Code Export
軟件在回路一般是通過SIMAPACK接口或第三方軟件,保證模型之間的數據傳輸。其中以第三方軟件(matlab)為常采用實現模式。SIMAT在多學科仿真算例介紹
SIMPACK為用戶提供多種數據交互方式,從圖2可以看出,其中SIMAT方式可以實現數據雙向交互,下面具體介紹SIMAT實現交互的算例。
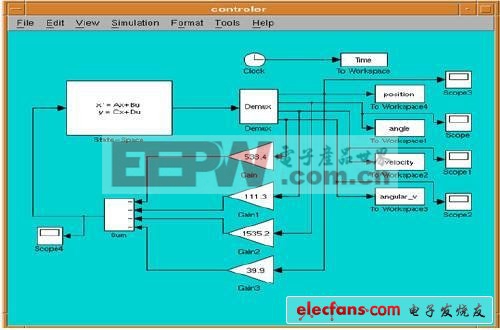
實例背景為:倒立擺小車,該小車在未控制下行駛,倒立擺倒下,當采用SIMLINK控制后,通過SIMAT數據雙向傳輸,保證實時對小車速度控制,小車上的倒立擺能平穩豎立。該控制方案如圖3所示,控制后的效果如圖4所示。


評論