三進三出不間斷電源的并聯技術

1.前 言
本文引用地址:http://www.czjhyjcfj.com/article/176514.htm不間斷電源(UPS)并機系統以其擴容方便、節約投資、可靠性高而逐漸被廣泛采用,并深受用戶歡迎。所謂UPS并機系統是指需并聯的多臺UPS的輸出直接并聯短接在一起,同時分擔負載電流,不需外加任何設備,使整個供電系統的可靠性提高,供電容量也同時得到提高。但是,并聯UPS會有如下主要問題:
1) 各臺UPS輸出的電壓、相位、頻率很難嚴格一致,即使有1度的相位誤差也可引起50%的功率差別,當空載時,某些UPS可能會運行在整流狀態。
2) 由于各臺UPS的輸出電壓、電流均為正弦量,而且有相位誤差和頻率誤差,所以,很難實現負載分配和均流。
3) 并聯運行時,若各臺UPS的頻率和相位相同,而幅度不同,則系統中各臺UPS之間會存在無功的環流分量,嚴重時會使UPS保護,甚至使逆變器停止工作。
鑒于以上存在的問題,我們提出在并聯系統中,把每一臺UPS輸出的電壓、電流、頻率和相位信號進行采樣、綜合,然后,再與其它UPS的相應信號進行綜合,從而得出各自電壓及頻率的補償信號,然后送至系統中的其它UPS,最終保證各臺UPS輸出電壓的幅值、電流、相位和頻率嚴格一致。當其中某臺UPS因故障而退出時,并不影響整個并聯系統的運行,因而可實現真正的N+1 臺并聯運行。
2.并機原理
整個UPS并機系統以數字信號處理器TMS320F240為核心,輔以必要的外圍功能單元電路構成,UPS并機控制系統框圖如圖1所示。
數字信號處理器(DSP)通過對各種信號的檢測,加以分析處理,然后送到逆變器控制電路和狀態顯示電路;同時,通過通信接口電路與并機系統中的其他UPS進行信息交換。
波形控制接口電路的功能是將DSP發出的控制后級UPS的逆變輸出信號進行電平匹配,使其符合一定的精度和幅值要求。
相位控制接口電路的作用是將DSP發出的同步信號經過電平轉換及阻抗匹配后送到后級UPS控制電路中作為UPS鎖相的給定信號。
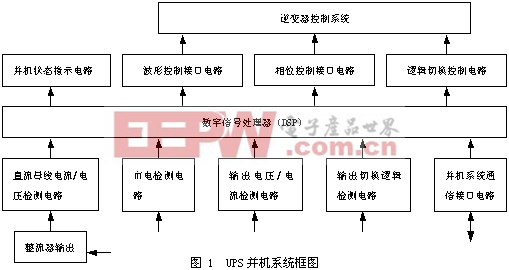
邏輯切換控制電路的功能是將DSP發出的控制信號經過電平變換后去驅動靜態開關動作,完成相應的邏輯關系控制。
直流母線電流檢測電路的功能是檢測UPS整流輸出直流母線上流過的電流大小,該直流母線電流經霍爾傳感器變換,再經電平匹配電路后送到DSP的AD接口。
直流母線電壓檢測電路的作用是將UPS整流輸出的直流母線電壓變換后送到DSP的AD接口。
輸出電流及輸出電壓檢測電路的作用是將UPS的輸出電壓及輸出電流經過交流電壓互感器及交流電流互感器檢測后,再經過電平轉換,送到DSP的AD接口,作為DSP的控制程序對UPS的輸出電壓和輸出電流進行實時控制的反饋量。
市電檢測電路的作用是將交流市電經變換后送到DSP中,作為控制UPS電源與市電同步的給定值。
所有的檢測量經AD接口送到DSP,DSP完成對各模擬參數的模擬/數字轉換及數字優化濾波,濾除噪聲干擾,分離出有用的信號,保證檢測信號的真實性及有效性。
UPS并聯控制系統的通訊接口電路將本UPS的工作狀態(輸出電壓幅值、輸出電壓頻率、輸出電壓的相位、切換邏輯要求等)送到通訊總線上,并通過通訊總線接收并聯控制系統其它UPS發出的工作狀態信號,作為并聯系統進行均流控制、邏輯切換的重要依據。
3.并機系統結構及DSP控制軟件
3.1 UPS并機系統結構
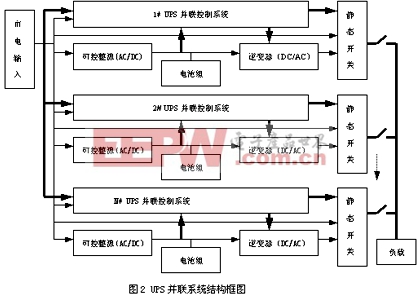
UPS并機系統結構框圖如圖2所示,并機系統中的所有UPS均通過通訊接口相連,各UPS的輸出則直接并接給負載供電。
3.2 控制軟件
3.2.1. DSP主程序
DSP主程序根據并聯控制系統的通訊接口電路接受到的其他并聯運行UPS發出的切換邏輯要求,并根據當前本機的運行狀況進行相應的邏輯分析和判斷,保證所有并聯運行UPS的靜態開關同時切換到旁路運行狀態p或同時切換到逆變器運行狀態,完成并機系統的邏輯切換控制。由于在并機系統的邏輯切換過程中,沒有主機或從機之分,因此,任意一臺處于并聯運行且處于負載狀態下的UPS可以從并聯 運行的UPS并聯系統中退出,或者任意一臺處于空載狀態的(或者新啟動的)UPS可以并入N臺并聯運行的UPS并聯運行系統中,實現N+1臺UPS的并聯運行,也就實現了N+1冗余并聯運行。DSP的主程序流程圖如圖4 所示。
3.2.2. DSP控制子程序
DSP控制子程序根據由通訊接口電路接收到的其它并聯運行的UPS發出的輸出電壓幅值、輸出電壓頻率、輸出電壓相位等數據,以及接收到的本UPS的輸出電壓幅值、輸出電壓頻率、輸出電壓相位等數據,經過采樣處理,然后經過輸出電壓幅值控制算法程序、輸出電壓的頻率算法程序、輸出電壓的相位算法程序等的綜合運算,從而對UPS輸出電壓的相位、頻率、幅值等參數進行實時控制,使各臺并聯運行的UPS輸出相同的電壓幅值、電壓頻率和電壓相位,使各臺UPS共同對負載供電,且實現所有并聯運行的UPS平均分擔負載,滿足并聯運行的技術要求。控制子程序流程圖如圖3 所示。





評論