6LoWPAN在物聯網中的應用仿真

1.2 Mesh Delivery字段的改進
基于IEEE802.15.4可以構建星形、樹狀和Mesh狀網絡拓撲結構。星型拓撲的無線網絡結構簡單,覆蓋范圍小,鏈路冗余度差,可靠性低,拓撲擴展不便;樹狀拓撲結構適合于節點靜止或者移動少的場合,其路由屬于靜態路由,不需要存儲路由表,它對傳輸數據包的響應較快,缺點是所選擇的路由并非是最佳的路由;而Mesh狀的網絡則適合節點移動頻繁和節點數目多的場景,因而更適合于實際的應用。
從適配層分片報文格式可知,除了第一片外,后續分片的Mesh Delivery字段都要添加適應層源地址和適應層最終目的地址,這樣就無形中大大增加了網絡的負載。為了減少負載,可以對后續分片進行修改。由于后續分片和第一片的適應層源地址和適應層最終目的地址完全相同,因而可以取消后續片的地址字段。為了不改變原來的選路功能,可用datagram_tag字段取代地址字段,把原來較長的Mesh Delivery地址字段改成僅需9 b的datagram_tag字段,這樣就減少了后續分片所增加的負載,提高了網絡的利用率。在進行選路時,可通過讀取datagram_ tag字段獲取地址,由于后續片的datagram_tag字段值和第一片相同,所以,就可通過該字段獲取第一片的地址,這樣就能實現選路功能。修改后的Mesh Delivery字段格式如圖4所示。本文引用地址:http://www.czjhyjcfj.com/article/175896.htm

另外,由于選路時讀取的是9 b的datagram_tag字段值,要比讀取源地址和最終目的地址快得多,每個分片都會節省大量時間,這樣,總的時延也就減少了很多,從而大大降低了傳輸時延。
1.3 感知節點與IPv6節點的通信過程
感知節點與IPv6節點進行通信時,首先由IPv6節點向目的感知節點發送一個獲取采集數據的請求數據包,此數據包到達網關時,網關將IPv6請求數據包進行精簡(即壓縮),然后根據IPv6報文是否需要分片的要求分別用相應的適配層頭部封裝精簡過的IPv6數據包,最后將其封裝成IEEE802.15.4幀在鏈路層進行傳輸,然后到達目的感知節點;目的感知節點接收到所有的分片后,對分片進行重組,然后處理IPv6報文中的應用層數據(即服務請求消息),處理完成后,再用精簡的IPv6報文頭部按分片的要求對響應數據進行封裝,以將其封裝成IEEE802. 15.4幀進行傳輸;之后,即可根據適配層頭部信息對返回的IPv6報文進行重組,并對精簡IPv6報頭進行還原操作;最后,再將完整的IPv6報文封裝到IPv6網絡所使用的鏈路層幀中,并將其發送到IPv6網絡上,IPv6網絡按照IPv6路由方式將此幀路由到源節點,以結束傳輸過程。
2 仿真結果分析
改進結束后,即可在仿真環境下比較改進后的6LoWPAN協議與原協議的性能。可在仿真區域內布置1個網關節點與150個感知節點,為了取得明顯的效果,選擇的數據包部應是大于1 500 B的數據包,通過實驗可對改進后的6LoWPAN協議與原協議的平均傳輸成功率、平均延遲時間性能進行分析。其中,平均延遲時間是指發送方發送數據包時刻到接收方接收到數據包時刻之間的平均時間間隔,其分析結果如圖5所示。
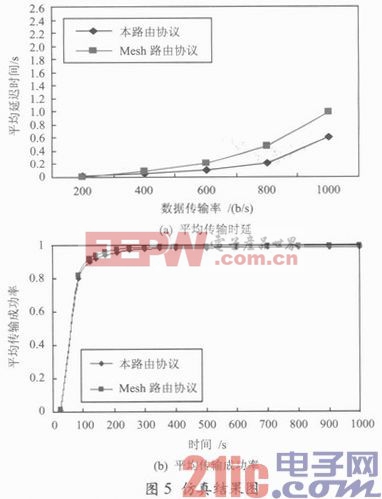
由圖5所示的仿真結果可見,改進后的6LoWPAN協議,不但沒有對選路產生影響,反而還在一定程度上提高了數據包的接收率。另外,改進后的協議在減少開銷的同時,選路時也減少了延遲時間,其原因是對于分片的報文,只讀取了9 b的datagram_tag字段,從而要比讀取較長地址字段大大節省時間。
3 結語
本文提出了一種基于6LoWPAN物聯網的應用方案,并在原有6LoWPAN協議的基礎上對Mesh路由字段進行了改進。最后,在網絡仿真環境下對本協議的數據包接收率、平均延遲時間等性能參數進行了比較分析。實驗數據表明,經過改進的6LoWPAN協議具有更好的性能。

物聯網相關文章:物聯網是什么








評論