超聲車距預警系統設計

摘要:設計一種超聲車距預警系統,該系統采用單片機控制技術和超聲波測距技術,通過顯示障礙物與汽車的距離并根據其距離遠近實時發出報警。該設計采用三傳感器接收系統解決了障礙物的二維定位問題,并對所使用的車距預警系統進行了誤差分析。
關鍵詞:車距預警;超聲波測距;單片機控制;二維定位
0 引言
隨著汽車工業的發展,汽車不再是單純的機械產品,而是各種科技集中的載體。車距預警系統的開發也成為提高汽車智能化的重要內容之一。該系統的運用可極大地降低倒車難度,避免駕駛員因方向感不強、判斷和操作失誤而引起事故,同時它將對提高汽車智能化水平和最終實現汽車無人駕駛產生積極的意義。
本文選擇了現階段廣泛應用于車距預警系統中的超聲波測距。超聲波測距的成本較低,容易實現,可靠性較高。本設計可測量的范圍為0.39~10.3 m,除了基本的超聲波測距電路外,還有測溫電路、車速檢測電路、電源模塊及語音報警電路。并且,系統采用三接收傳感器的設計方案來確定障礙物的空間三維坐標位置。本設計具有操作簡便、工作穩定可靠、檢測速度快和成本低等特點,可實現無接觸式測量,應用廣泛。
1 超聲波測距儀工作原理
本文的超聲波測距中采用渡越時間檢測法,發射器發射超聲波,經過障礙物反射后被接收器接收,測量發射器發射和接收器接收超聲波的時間差為t,同時,超聲波在空氣中的傳播速度c受環境溫度τ的影響較大,考慮了環境溫度對傳播速度的影響后,距離公式為:
![]()
本設計選用頻率為40 kHz左右的超聲波,它在空氣中傳播的效率最佳。同時,超聲波探頭(即超聲波傳感器)采用的是防水型收發一體式雙晶片壓電振動式超聲換能器TCF40-25TR,其中心頻率為(40±1)kHz,恰好適用于本設計的超聲波頻率。
2 車距預警系統的原理分析與硬件設計
在完成超聲波測距的理論分析后,需要將超聲波測距的硬件安裝在車尾,這就需要進一步分析和設計車距預警系統。
2.1 車距預警系統的原理分析
超聲波測距的目的是為了測得超聲波探頭到障礙物之間的距離,但是超聲波測距系統無法對障礙物進行空間二維甚至是平面二維的定位。為了解決這個問題,本設計提出了三接收傳感器的設計方案來確定障礙物的平面二維坐標位置。
若安裝的位置間距不同,三個接收器探頭接收回來的時間值是不一樣的。由三個接收探頭和超聲波反射點可以確定一個空間四面體的全部邊長參數,根據幾何關系,通過這幾個邊長參數,可以求得超聲波反射點的坐標值,亦即障礙物的具體位置。

如圖1所示為車距預警系統的硬件結構設計,分別有單片機及其外圍電路、超聲波發射電路、超聲波接收電路、測溫電路、電源電路、車速檢測電路和語音報警電路。
2.2 車距預警系統的硬件設計
2.2.1 單片機及其外圍電路的設計
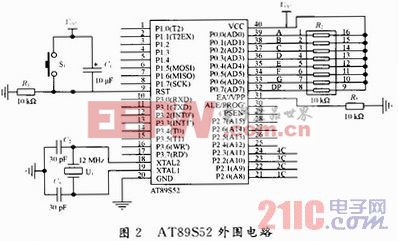
在本設計中,主控芯片選擇的是單片機AT89S52。最小系統由AT89S52芯片以及外圍電路組成(如圖2所示),是整個超聲波測距系統的核心部分。






評論