帶跟瞄功能的視覺眼孔通信模型研究

3.2 目標瞄準抖動的Rician分布及瞄準圖示:本文引用地址:http://www.czjhyjcfj.com/article/167005.htm
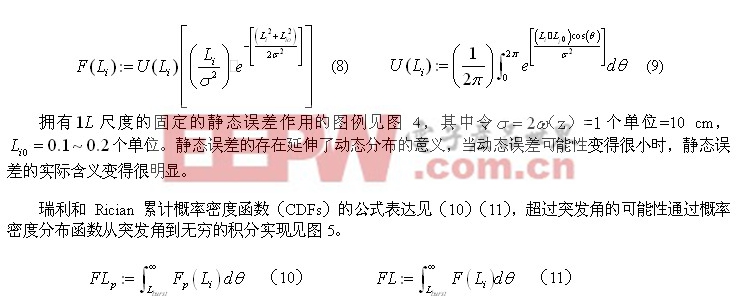
眼孔波通信抖動瞄準的數(shù)學表達:
在距離Z處,抖動的動態(tài)分量用L表示,靜態(tài)分量用 表示,瞄準誤差概率分布函數(shù)見公式(8),這個函數(shù)是Rician分布在文獻中[3]以角度形式討論,在本文中以尺寸形式討論;在該分布函數(shù)中 是改進的Bessel函數(shù)見公式(9)。在靜態(tài)瞄準誤差不存在的情況下,這個分布函數(shù)轉化成多數(shù)研究者更熟悉的簡化形式即瑞利分布見公式(5)。
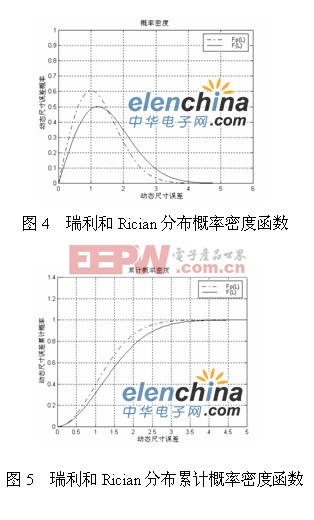
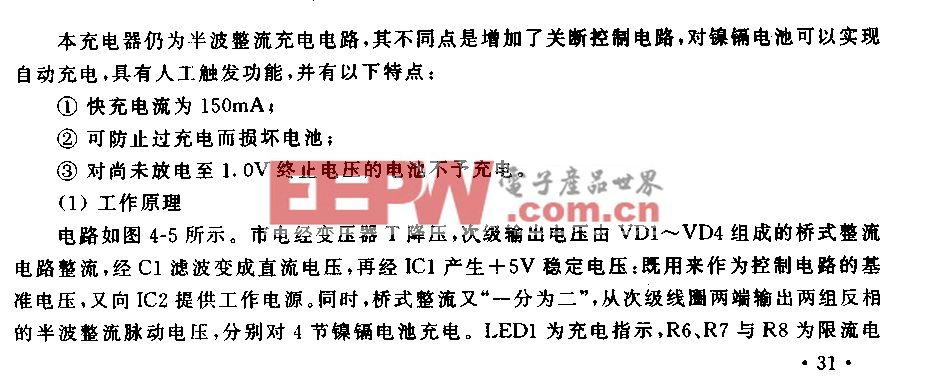
在瞄準中,瞄準目標小幅度抖動現(xiàn)象對運動目標瞄準是經(jīng)常存在的。在此給出抖動目標瞄準的Rician分布及圖示圖4和圖5。
圍繞目標抖動,給出跟瞄ATP分析圖示見圖6:

4 結論
首次提出機器人視覺系統(tǒng)眼孔波通信框架或眼孔波通信框架,這種眼孔波的信息傳送可以用小型大氣激光通信系統(tǒng)在機器人視覺中的應用的方法實現(xiàn)。本文提出了眼孔波通信構架,解決了該通信系統(tǒng)的捕獲和跟瞄問題(ATP問題),建立了相應數(shù)學模型。



評論