基于神經網絡的多電機同步控制

1 引言
在造紙、印染、紡織等高精度、高轉速傳動系統中,隨著工業自動化程度的提高和生產規模的擴大,采用單電機驅動往往難以滿足生產的要求。而多電機同步控制歷來是最核心的問題,對多電機同步協調控制,國內、外同行也有不少研究。在實際應用中,多電機的同步性能會因各傳動軸的驅動特性不匹配、負載的擾動等因素的影響而惡化,因此同步控制方法的好壞直接影響著系統的可靠性。
本文通過對的多電機同步傳動系統主要控制策略分析,得出改進的耦合控制是當前比較好的控制思想,實際應用中采用易于實現的PID作為同步補償控制器算法。但傳統PID控制器結構簡單、魯棒性較差且抗擾動能力也不太理想。因此在控制策略上,采用神經網絡控制和PID控制算法相結合的方法。仿真結果表明,將該方法用于多電機同步控制中,不僅具有良好的動態性能,而且整個系統同步精度也有所提高。
2 多電機同步控制的原理
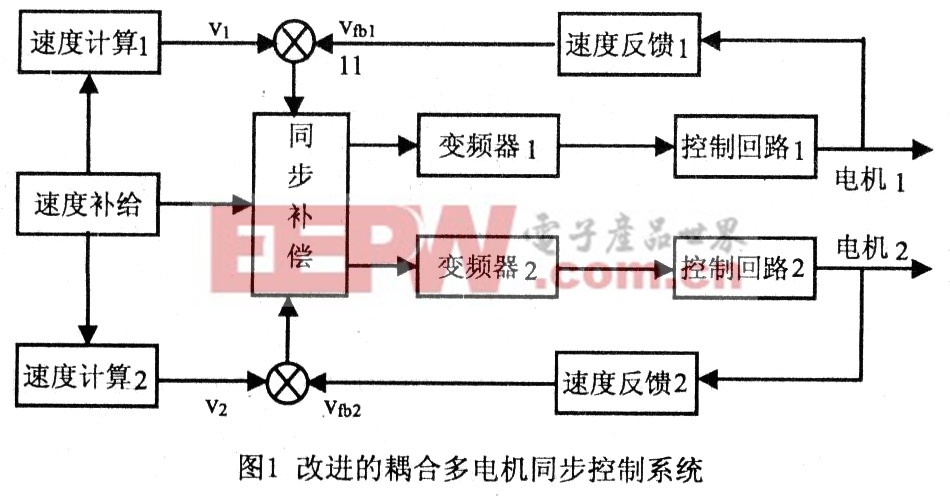
對于多電機同步控制系統來說,實現的是電動機轉速的跟隨,受到擾動的電動機轉速是變化的,其它的電動機跟隨這臺電動機的轉速變化。在系統受到擾動后的初始狀態,電動機之間的轉速趨于同步越快越好,即應盡快消除轉速偏差;當電動機之間的轉速趨于同步時,要盡量減小轉速發生超調。一般情況是要求系統中的第i臺電動機轉速vi和第i+l臺電動機轉速vi+1,之間保持一定的比例關系,即vi=a?vi+1以滿足系統的實際工藝要求。這里a為轉速同步系數。在實際運行過程中若要滿足系統的同步要求,周期采樣獲取某一環節的前臺電動機轉速vi和后臺電動機轉速vi+1后,vi和vi+1按下式定義轉速同步偏差時,表明在同步系數a下,vi和vi+1同步,當e≠0時,表明在同步系統aF,vi和vi+l不同步.在本文中采用改進的耦合同步控制系統(如圖1),各電機采用同一電壓給定的基礎上,電機l轉速誤差△v1=v1―vfb1,電機2的轉速誤差△v2=v2一vfb2,計算某一電機實際速度和給定速度的偏差e,以及當前的偏差變化量△e,同步控制器補償同樣采用PID控制。其差值經過PID補償器加到隨動電機輸入端。
3 基于神經網絡PID控制器的建立
BP神經網絡是應用最廣泛的一種人工神經網絡,在各門學科領域中都具有很重要的實用價值,根據本系統的控制系統的特點,為了快速消除同步誤差,本文采用BP神經網絡與PID相結合的作為同步補償方法。
3.1 BP神經網絡PID控制系統的結構
基于BP網絡的PID控制系統結構如圖2所示,控制器由兩部分組成:

(1)常規PID控制器,直接對被控對象進行閉環控制,并且其控制參數Kp、Ki、Kd為在線調整方式;

pid控制器相關文章:pid控制器原理











評論