基于LabVIEW與MATLAB的模糊參數(shù)自整定PID控制

1 引言
本文引用地址:http://www.czjhyjcfj.com/article/163792.htm傳統(tǒng)的PID控制器結(jié)構(gòu)簡單,穩(wěn)定性好,可靠性高,制造技術(shù)成熟,已廣泛應(yīng)用于工業(yè)生產(chǎn)過程的控制中。但它主要適用于控制具有確切模型的線性過程,而對于具有非線性、大滯后和時(shí)變不確定的系統(tǒng),則無法達(dá)到理想的控制效果。人工智能的興起和快速發(fā)展為控制領(lǐng)域提供了全新的方法。模糊控制是人工智能控制的一個(gè)重要分支,它是運(yùn)用模糊數(shù)學(xué)的基本理論和方法,把規(guī)則的條件、操作用模糊集表示,并把這些模糊控制規(guī)則及有關(guān)信息作為知識存入計(jì)算機(jī)知識庫中,然后計(jì)算機(jī)根據(jù)控制系統(tǒng)的實(shí)際響應(yīng)情況,運(yùn)用模糊推理決定系統(tǒng)控制量的大小。將模糊理論與PID控制策略相結(jié)合,可實(shí)現(xiàn)對PID參數(shù)在線自適應(yīng)調(diào)整,使系統(tǒng)既具有模糊控制的靈活、適應(yīng)性強(qiáng)的優(yōu)點(diǎn),又具有PID控制精度高的特點(diǎn)。模糊控制器是當(dāng)前控制領(lǐng)域的研發(fā)熱點(diǎn)之一,其研發(fā)的方法不盡相同。本文闡述了利用LabVIEW與MATLAB混合編程技術(shù)將MATLAB中的模糊邏輯工具箱(FIS Toolbox)與LabVIEW虛擬儀器開發(fā)軟件集成,研制出模糊參數(shù)自整定PID虛擬控制器,并實(shí)現(xiàn)了對非線性系統(tǒng)的實(shí)時(shí)測控。
2 Fuzzy-PID控制策略
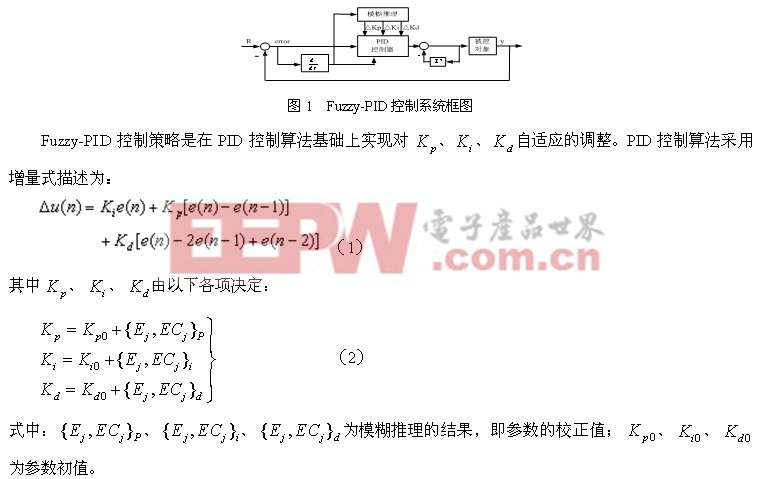
模糊參數(shù)自整定PID控制器以系統(tǒng)偏差E和偏差變化EC作為輸入,可以滿足不同時(shí)刻的E和EC對PID參數(shù)自整定的要求。利用模糊控制規(guī)則在線對PID參數(shù)進(jìn)行修改,便可構(gòu)成模糊參數(shù)自整定PID控制系統(tǒng)(以下稱Fuzzy-PID控制系統(tǒng)),其結(jié)構(gòu)如圖1所示:
3 控制器設(shè)計(jì)
模糊控制設(shè)計(jì)的核心是總結(jié)工程設(shè)計(jì)人員的技術(shù)知識和實(shí)際操作經(jīng)驗(yàn),建立合適的模糊規(guī)則表,并組建一個(gè)推理結(jié)構(gòu),實(shí)現(xiàn)模糊規(guī)則。
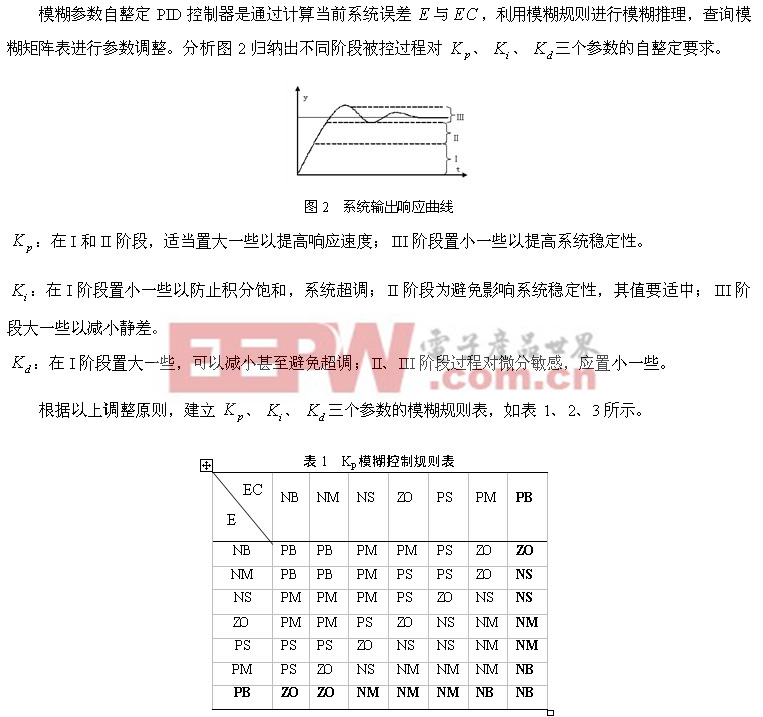
3.1 模糊規(guī)則表的建立

3.2 FIS 推理結(jié)構(gòu)的編輯

pid控制相關(guān)文章:pid控制原理
pid控制器相關(guān)文章:pid控制器原理










評論