基于LPC2119的自主式移動機器人設計

超聲波發射及接收子系統如圖2所示。1051利用P1.0引腳向外發送40kHz的脈沖信號,此信號作為4-16譯碼器74HC154的使能信號,引腳P1.1~P1.4作為譯碼信號,分別對應編號0~15的超聲波傳感器。此信號經過9013放大后推動換能器產生40kHz的超聲波信號。
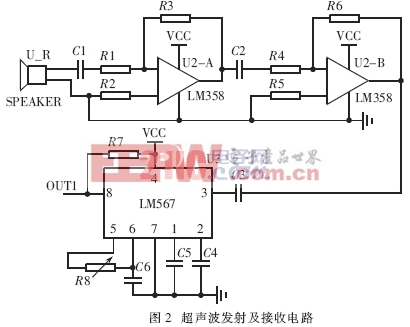
LM567是一片鎖相環電路,其5、6腳外接的電阻和電容決定了內部壓控振蕩器的中心頻率f2,f2≈1/1.1RC。其1、2腳分別通過電容器接地,形成輸出濾波網絡和環路單級低通濾波網絡。2腳所接電容決定鎖相環路的捕捉帶寬:電容值越大,環路帶寬越窄。LM567的工作電壓為4.75~9V,工作頻率從直流到500kHz,靜態工作電流約8mA。
超聲子系統基本功能為:當接收器接收到超聲波回波時,產生交流小信號,此信號經過LM358組成2級放大電路后,幅值達25mV以上。當LM567的3腳輸入幅度≥25mV、頻率為40kHz的信號時,8腳由高電平變成低電平,此低電平信號被連接到1051的INT0引腳產生中斷信號。1051在超聲波發送時啟動定時器,在INT0中斷時關閉定時器,由此可以得到超聲波的傳播時間,并計算出障礙物距離。
應用本系統對測量范圍為30~400cm的平面物體做了多次測量發現,其最大誤差為0.5cm,且重復性好。如果加大超聲波發射的驅動電流,接收部分的放大電路再加一級,可以使檢測距離增大到600cm。 本文引用地址:http://www.czjhyjcfj.com/article/163069.htm
1.3 無線通信子系統
此系統選用微小型、低功耗、19.2kbps的無線收發MODEM芯片PTR2000實現機器人與計算機的無線通信。該芯片的工作頻率為國際通用的數傳頻段433MHz,采用FSK調制,可連接到計算機的RS232接口。系統采用的通信協議如下:
[開始字符] [數據1] [數據2]……[校驗和] [結束字符]
將PTR2000的DO、DIN引腳分別與LPC2119的TXD0(13引腳)和RXD0(14引腳)相連,作為串行通信的通道。CS為PTR2000模塊的頻率選擇信號;PWR為模塊節能引腳,正常工作為高電平。TXEN是模塊發射接收控制,由LPC2119的I/O口控制。PTR2000是收發一體的集成芯片,采用3.3V供電,可以與LPC2119無縫連接。PTR2000作為發射端與PC機相連時,需要通過一個電平轉換器(本文為MAX3232)轉換成RS-232電平。PLC2119可以通過把輸出口置1或清0將無線收發模塊PTR2000設置為發送或接收狀態;可通過VB的MSComm控件的RTSEnable屬性實現對計算機串口的控制。
1.4 光敏傳感器子系統
機器人使用的光敏傳感器為硫化鎘光電管(CDS)。硫化鎘光電管的電阻值隨著照射的表面光的多少而變化,光線越強,電阻值越小。硫化鎘光電管通常也稱為光敏電阻。CDS的電阻值對較少的光線就能產生較大的變化,是機器人系統較為常用的一種光敏傳感器。在機器人車體上平均分布8個同樣的光敏傳感器,感知機器人周圍的光強變化。通過采集各傳感器的輸出電壓,由軟件算法確定機器人的路徑,使機器人總是朝光線更強的方向行走,實現對光源的尋找。
將一個精密電阻與CDS器件串聯,該電阻起分壓作用,將CDS器件的電阻值轉換成應對模/數轉換器件(ADC)適當的電壓值。CDS器件的分壓輸出給ADC,隨后電壓值轉換為數字值。當更多的光線照在CDS器件上時,其電阻和ADC上輸出的電壓值都會減小。一般取這個精密電阻的阻值與CDS器件的最大電阻值相等。
2 軟件編程
因任務不同,系統的軟件設計有所不同。本移動機器人系統的任務是在已知大小且光線較暗的封閉環境中自主尋找光源。
系統軟件在啟動后先進行系統的自檢和初始化,然后進行路徑的規劃。先橫向遍歷整個環境,如果發現光源,機器人停止運動,等待命令;如果沒有找到光源,再縱向遍歷整個環境,如果發現光源,機器人停止運動;如果還是沒有找到,就顯示出錯信息。當超聲波子系統發現前方有障礙物或機器人與障礙物發生碰撞時,將產生外部中斷,終止程序的運行,控制器LPC2119將收到障礙物距離或碰撞信息,并由此重新規劃路徑,由此實現機器人的自主運行。
本設計是一個基于ARM7微處理器的車載嵌入式系統,不僅滿足了移動機器人控制系統的要求而且為機器人的轉型應用提供了良好的技術支持。在此基礎上可以加入各種先進的控制算法,實現移動機器人的智能化。










評論