基于ARM7的畜牧養殖智能消毒機器人控制系統設計

2.2.3 GPRS外圍網絡模塊
GPRS模塊第15管腳必須持續3s的低電平才能實現模塊的啟動。本文采用的是軟件模擬低電平GPRS模塊啟動。關機電路同樣是管腳持續低電平3s,電路如圖3所示。

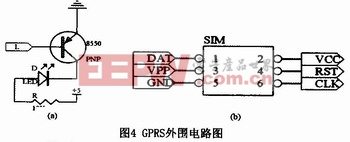
GPRS模塊第35腳是一個工作狀態指示燈接口,狀態表示分別為:亮1s滅1s為啟動搜索信號;亮1s滅2s為信號正常;持續點亮為有數據輸入或者輸出。其工作原理圖如圖4(a)所示。圖4(b)為GPRS模塊SIM卡連接示意圖。
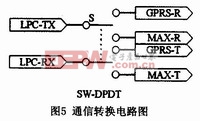
GPRS模塊串口工作方式的電平為TTL電平,所以GPRS模塊和控制核心處理器的連接可以是直接連接。但考慮到模塊的調試及程序的燒錄,所以在GPRS模塊與處理器連接處使用轉接開關。以此完成電腦到處理器的通信、GPRS模塊到電腦的通信。GPRS模塊、處理器、電腦的通信電路連接示意圖如圖5所示。
3 監視模塊
監視模塊采用的是普通高清視頻攝像頭,分辨率達1024×768。視頻采用PAL模式傳輸經處理器處理,通過無線互聯網把圖像傳輸到客戶端,其電路圖如圖6(a)所示。攝像頭的各方位由單片機驅動舵機來實現,舵機驅動電路如圖6(b)所示。











評論