基于故障分量原理的電動機差動保護裝置

采用故障分量原理設計了一種微機保護裝置,介紹了基于該技術的保護裝置彌補已有的電動機綜合保護裝置的不足,與電動機綜合保護裝置相結合能滿足大型高壓電動機對保護的要求。并通過與傳統差動保護的比較,說明采用故障分量作為制動量的差動保護所具備的優越性。對保護裝置的硬件設計,以及保護原理進行了介紹,并給出了對信號處理的算法。
關鍵詞:微機保護;故障分量;比率差動;傅氏算法
A Motor Differential Protection Device Based on Fault Component
BI Rui , WEN Yang-dong , XU Hua-li
(School of Electric Engineering and Automation ,Hefei University of technology ,Hefei 230009,China )
Abstract: A microcomputer-based motor protection device based on fault component is designed in this paper. The device compensates the insufficiency of the microcomputer-based motor integrated protection device designed previously. Using the two devices in practice can meet the demands of high-voltage motor. Compared with traditional differential protection based on all components, differential protection based on fault component show its advantage. The design of device's hardware , the theory of protection and the algorithm of signals processing are introduced in the paper.
Keywords: microcomputer-based protection ;fault component;percentage differential protection;Fourier algorithm
0 引言
大型高壓電動機作為昂貴的電氣主設備在發電廠,化工廠等大企業得到廣泛的應用。如果發生嚴重故障導致電機燒毀,將嚴重影響生產的正常進行,造成巨大的經濟損失,因此必須對其提供完善的保護。現有電動機綜合保護裝置主要針對中小型電動機,為其提供電流速斷,熱過載反時限過流,兩段式定時限負序,零序電流,轉子停滯,啟動時間過長,頻繁啟動等保護功能。而對于2000KW以上特大容量電動機,則無法滿足其內部故障時對保護靈敏度與速動性的要求,因而研制此裝置并配合綜合保護裝置,為高壓電動機提供更可靠更靈敏的保護措施。本裝置設計成三相式縱差,因為2000KW以上特大容量的電動機所在的3KVp6KVp10KV電網可能是變壓器中性點經高電阻接地的電網,三相式縱差保護不但能作為電動機定子繞組及引出線相間短路的主保護,而且可作為單相接地故障的主保護,作用于瞬時跳閘。
1 裝置的整體硬件結構
該裝置的硬件結構圖如圖圖1所示。
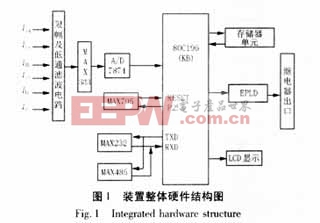
裝置采用Intel公司的80C196KB作為處理器。為提高系統的抗干擾性,防止程序的跑飛,使用了一塊MAX705芯片作為硬件看門狗。所有的數字量的輸入輸出均由EPLD(可擦除可編程邏輯電路)芯片的管腳引入引出,開關量(未在圖中標出)經光耦后進入EPLD. 除此之外EPLD還擔負著系統中外圍芯片片選的地址譯碼工作和數字邏輯門電路的實現。A/D使用美國模擬器件公司的AD7874,AD7874是四輸入12位數據采集系統,采樣精度高,而且由于能同時采樣4路信號,可以減小由于信號的非同時采樣帶來的誤差。本裝置以串口通信方式和上位機交換 數據,為滿足不同的用戶可能采用的不同通訊方式的要求,本裝置設計了RS-232和RS-485兩個通訊接口,用戶可以根據需要自由選擇。
2 保護原理及算法說明
2.1 保護原理及優點
各種類型的差動保護區別主要表現在制動量的構成上。在傳統的縱差保護中的制動量是由故障分量疊加穿越電流構成的,而故障分量縱差保護的制動量則僅僅由故障分量構成,具體分析如下。
2.1.1 傳統差動與基于故障分量縱差的構成
以如下最簡單的兩側電源為例。(如圖2)
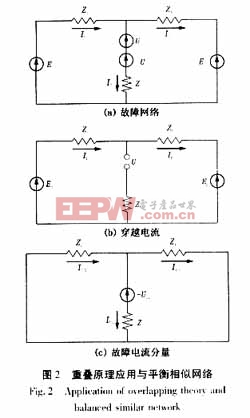
圖2(a)為故障網絡。傳統縱差保護所比較的是兩側的全電流,這里全電流( Is和Ir )包括兩部分:即由兩電源電動勢不等(Er≠Es)所產生的穿越電流Ith(即圖2(b)中負荷電流Ip)和由故障點的故障前反向電壓-U△產生的故障電流分量Is△和Ir△(如圖2(c))。其差動電流構成可如下式: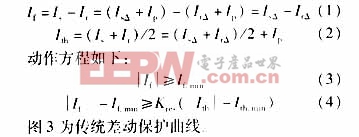




評論