基于視覺(jué)傳感器的自主車輛地面自動(dòng)辨識(shí)技術(shù)研究

3 神經(jīng)網(wǎng)絡(luò)模式識(shí)別模塊
應(yīng)用Matlab中BP神經(jīng)網(wǎng)絡(luò)模塊進(jìn)行分類與識(shí)別。人工神經(jīng)網(wǎng)絡(luò)簡(jiǎn)稱為神經(jīng)網(wǎng)絡(luò)。人工神經(jīng)元k表示為:

式中:xi為輸入信號(hào);wik為神經(jīng)元k的突觸權(quán)值;m為輸入信號(hào)數(shù)目;uk為線性組合器的輸出;bk為神經(jīng)元單元的閾值;f(·)為激活函數(shù);yk為輸出信號(hào)。神經(jīng)元的輸入/輸出狀態(tài)表示為:
式中:τij為突觸時(shí)延;Tj為j的閾值;wij為i到j(luò)的突觸連接系數(shù);f(·)為變換函數(shù)。
該設(shè)計(jì)在分析多種數(shù)據(jù)分類方法和理論之后,以石子路面、水泥路面、土壤路面、草地路面、磚地路面5種常見行車路面為研究對(duì)象,采集了6組路面圖像特征信息作為備選庫(kù),其中以質(zhì)量最優(yōu)的一組路面圖像特征信息作為訓(xùn)練樣本,把其他5組路面圖像特征信息作為測(cè)試樣本進(jìn)行BP神經(jīng)網(wǎng)絡(luò)的建立、訓(xùn)練、測(cè)試。
3.1 BP神經(jīng)網(wǎng)絡(luò)的建立
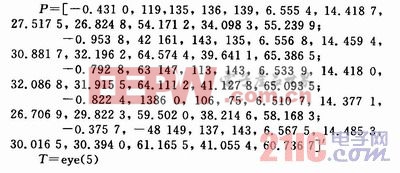
該設(shè)計(jì)在BP神經(jīng)網(wǎng)絡(luò)的建立過(guò)程中應(yīng)用newff()函數(shù)對(duì)各個(gè)參數(shù)進(jìn)行了相關(guān)設(shè)置。其訓(xùn)練樣本、目標(biāo)樣本如下所示:
3.2 BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練
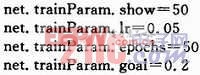
該設(shè)計(jì)在BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練過(guò)程中應(yīng)用train()函數(shù)對(duì)各個(gè)參數(shù)進(jìn)行了相關(guān)設(shè)置,其顯示周期、學(xué)習(xí)速度、最大訓(xùn)練輪回?cái)?shù)、目標(biāo)函數(shù)誤差如下所示:
3.3 BP神經(jīng)網(wǎng)絡(luò)的測(cè)試
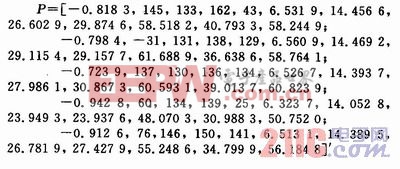
該設(shè)計(jì)在BP神經(jīng)網(wǎng)絡(luò)的測(cè)試過(guò)程中應(yīng)用sire()函數(shù)對(duì)各個(gè)參數(shù)進(jìn)行了相關(guān)設(shè)置,其測(cè)試樣本如下所示:
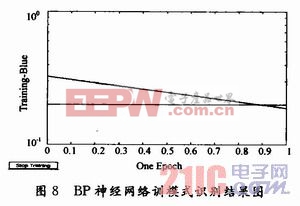
該設(shè)計(jì)中5種路面圖像的BP神經(jīng)網(wǎng)絡(luò)模式識(shí)別訓(xùn)練目標(biāo)函數(shù)誤差為20%,實(shí)現(xiàn)了方便快捷的模式識(shí)別分類功能,結(jié)果如圖8所示。
4 結(jié)語(yǔ)
文中研究的自主車輛地面自動(dòng)辨識(shí)技術(shù)基于視覺(jué)傳感器的地面圖像信息自主識(shí)別技術(shù),在諸多領(lǐng)域具有廣泛的應(yīng)用前景。通過(guò)對(duì)模式識(shí)別結(jié)果分析可知,訓(xùn)練目標(biāo)函數(shù)誤差為20%,該系統(tǒng)路面識(shí)別率達(dá)到預(yù)定要求,可以在智能車輛或移動(dòng)機(jī)器人等相關(guān)領(lǐng)域普及使用。












評(píng)論