人體跌倒遠程監測系統設計

隨著社會老齡化的不斷發展,預期到2030年空巢老年人家庭的比例將達到90%,屆時我國老年人家庭將空巢化。據統計,在65歲以上的老年人群中,每年有超過1/3的人都有跌倒經歷,2/3老年人意外死亡都是由跌倒引起的,而在75歲以上老人中這個比例更是高達70%。
本文引用地址:http://www.czjhyjcfj.com/article/161295.htm跌倒檢測是遠程健康監護系統中家庭終端的一種實現方式,涉及多個領域,包括信號采集與處理,信號特征提取,數據傳輸等方面的研究。跌倒檢測技術有很多,從信號獲取的渠道進行分類,可將跌倒檢測技術分為三類:基于視頻圖像的跌倒檢測,該方法不足之處在于它不能保證用戶的隱私安全并且視頻圖像的質量受光線等環境影響較大;基于聲學信號的跌倒檢測,安裝復雜且前期投入比較大;基于穿戴式裝置的跌倒檢測,較之前兩種方法在適用環境上和對用戶的干擾程度上有比較突出的優點。綜合比較各類檢測方法,基于穿戴式的檢測方法對老年人的健康進行遠程監管比較適合。
本文設計了一種佩帶在腰部的新型的基于加速度傳感數據采集的跌倒檢測模塊。在數據預處理階段,本文提出了基于1-class SVM分類預算法,并依據人體在不同動作下其能量損耗的最大量不同(閾值范圍不同)進行跌倒判斷[5],在確保系統準確性上增加了計算分析人體特定時間內的速度、位移及傾角這三個特征量作為輔助判據。
1 跌倒檢測模塊設計
1.1 架構設計
跌倒檢測模塊的總體架構如圖1所示。主要由加速度采集單元、微處理器單元、無線通信單元以及遠程跌倒監控后臺等構成,整體模塊采用鋰電池進行。系統由加速度采集單元進行加速度的采集,經微處理器單元對信號進行預處理,經預處理提取的可疑數據通過無線通信單元傳輸至遠程跌倒監控后臺進行最終的分析處理,在檢測到跌倒時系統能夠自動觸發警報項。

交互單元主要包括了功能按鍵、led指示燈和蜂鳴器,其中功能按鍵為用戶提供主動報警和取消誤報警的功能,LED指示燈主要用于顯示通信網絡的連通狀態,蜂鳴器在系統檢測到跌倒時能得到一個反饋的警報信號。
1.2 信號預處理
首先,采用13階的中值濾波器來濾除加速度采集裝置采樣值的噪聲,然后采用一個截止頻率為0.5 Hz的高通濾波器以及一個0.8 s的非重疊窗疊加來消除重力因素,以便濾出動態加速度信號作為下一步處理準備。
在濾波處理后,對原始數據采取基于1-class SVM的分類算法進行可疑數據的提取。1-class SVM算法是由SVM算法擴展而來,算法利用核函數將所有樣本映射到高維特征空間實現分類。在特征空間里,1-class SVM確定了一個包含所有目標數據的最小超球面體表面,這個表面就是分類器。用一組松弛變量來控制超球體的半徑和超出超球體的樣本數量。通過此算法可以提取出絕大部分的跌倒性樣本(陽性樣本)。
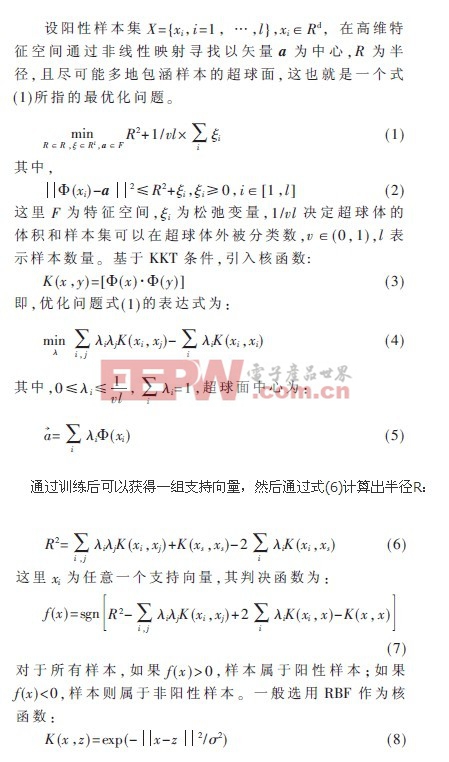
研究表明從低強度日常活動中區分跌倒性行為是非常有效的,但是當從較高強度的日常活動區分跌倒性行為則困難一些。因此該算法只作為數據的預處理過程中使用,從原始數據中分離出可疑數據。通過在實驗中調整松弛變量,可確保97%以上的真正跌倒樣本數據能夠被提取。
2 跌倒檢測算法
2.1 動作模型的建立
人體在跌倒過程當中,對象在各個方向上的加速度、速度和位移這三個矢量均會發生變化。實際上,如果僅根據各方向上的加速度的變化很難全面地分辨出跌倒動作。通過對加速在時間域上進行一次積分求取速度(v),兩次積分求取位移(s),以提高系統的準確性。
通過加速度傳感器采集到的加速度包含受到的地球重力加速度和人體運動引起的加速度這兩部分,并且任何時刻這兩部分都同時存在。以人體運動加速度為依據建立起人體三維動作模型,根據加速度傳感器的三個正交的測量方向可以建立三維坐標系,如圖2所示。
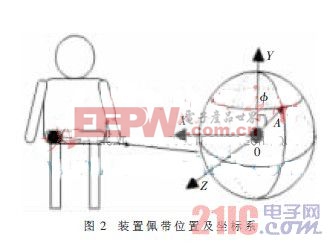
通常正確佩戴好裝置后,對象在處于靜止或是水平勻速運動狀態下時,Y方向的加速度表現為重力加速度(g),水平方向上的加速度為0。當對象發生跌倒時,如果只考慮始末狀態的加速度值的變化,縱向的變化范圍從1 g~0 g,而水平方向分量(x或z)的變化則是0 g~1 g。






評論